 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-displacement 3D Object Tracking with Hybrid Non-local Optimization
Paper and Code
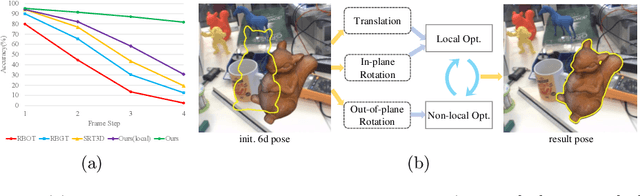

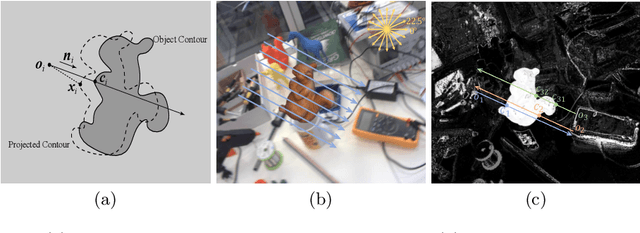

Optimization-based 3D object tracking is known to be precise and fast, but sensitive to large inter-frame displacements. In this paper we propose a fast and effective non-local 3D tracking method. Based on the observation that erroneous local minimum are mostly due to the out-of-plane rotation, we propose a hybrid approach combining non-local and local optimizations for different parameters, resulting in efficient non-local search in the 6D pose space. In addition, a precomputed robust contour-based tracking method is proposed for the pose optimization. By using long search lines with multiple candidate correspondences, it can adapt to different frame displacements without the need of coarse-to-fine search. After the pre-computation, pose updates can be conducted very fast, enabling the non-local optimization to run in real time. Our method outperforms all previous methods for both small and large displacements. For large displacements, the accuracy is greatly improved ($81.7\% \;\text{v.s.}\; 19.4\%$). At the same time, real-time speed ($>$50fps) can be achieved with only CPU. The source code is available at \url{https://github.com/cvbubbles/nonlocal-3dtracking}.