 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLapNet : Automatic Balanced Loss and Optimal Assignment for Real-Time Dense Object Detection
Paper and Code
Nov 04, 2019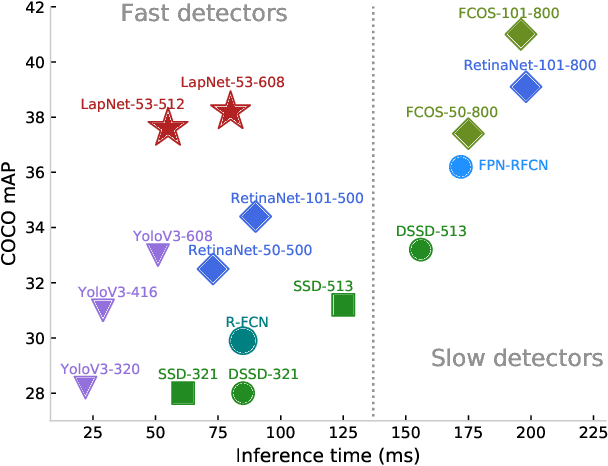

Several modern deep single-stage object detectors are really effective for real time processing but still remain less efficient than more complex ones. The trade-off between model performances and computing speed is an important challenge, directly related to the learning process. In this paper, we propose a new way to efficiently learn a single shot detector providing a very good trade-off between these two factors. For this purpose, we introduce LapNet, an anchor based detector, trained end-to-end without any sampling strategy. Our approach focuses on two limitations of anchor based detector training: (1) the ambiguity of anchor to ground truth assignment and (2) the imbalance between classes and the imbalance between object sizes. More specifically, a new method to assign positive and negative anchors is proposed, based on a new overlapping function called "Per-Object Normalized Overlap" (PONO). This more flexible assignment can be self-corrected by the network itself to avoid the ambiguity between close objects. In the learning process, we also propose to automatically learn weights to balance classes and object sizes to efficiently manage sample imbalance. It allows to build a robust object detector avoiding multi-scale prediction, in a semantic segmentation spirit.