 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLaplacian Pyramid Reconstruction and Refinement for Semantic Segmentation
Paper and Code

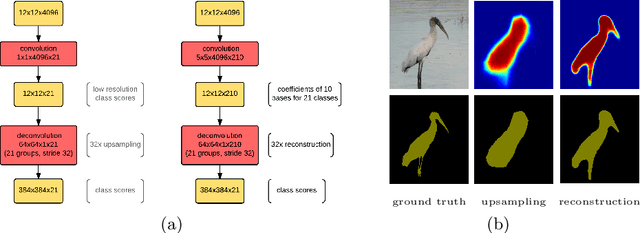
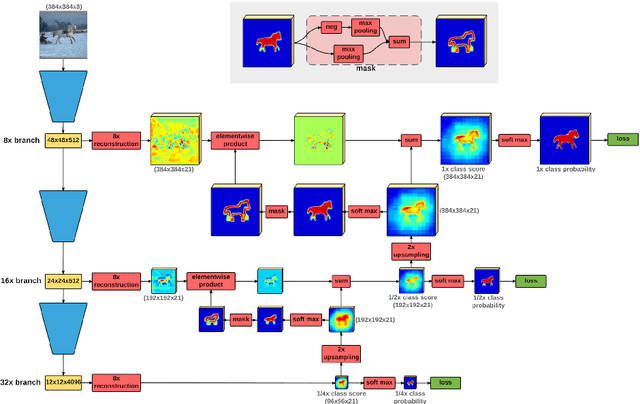
CNN architectures have terrific recognition performance but rely on spatial pooling which makes it difficult to adapt them to tasks that require dense, pixel-accurate labeling. This paper makes two contributions: (1) We demonstrate that while the apparent spatial resolution of convolutional feature maps is low, the high-dimensional feature representation contains significant sub-pixel localization information. (2) We describe a multi-resolution reconstruction architecture based on a Laplacian pyramid that uses skip connections from higher resolution feature maps and multiplicative gating to successively refine segment boundaries reconstructed from lower-resolution maps. This approach yields state-of-the-art semantic segmentation results on the PASCAL VOC and Cityscapes segmentation benchmarks without resorting to more complex random-field inference or instance detection driven architectures.