 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLandmark-based Distributed Topological Mapping and Navigation in GPS-denied Urban Environments Using Teams of Low-cost Robots
Paper and Code
Mar 05, 2021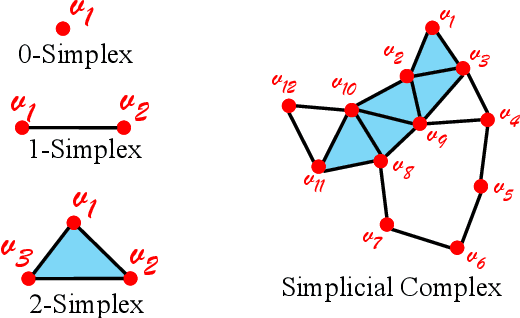
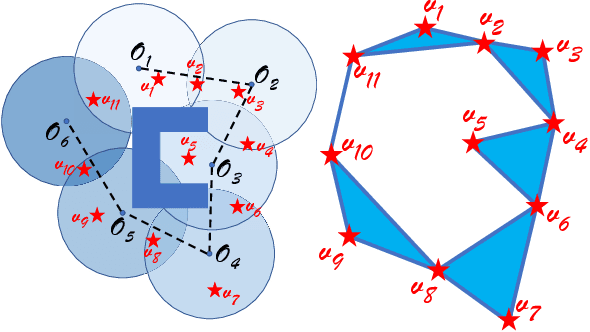
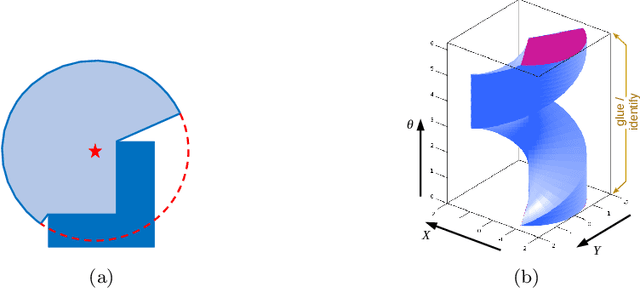
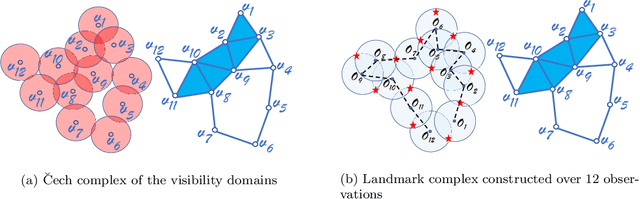
In this paper, we address the problem of autonomous multi-robot mapping, exploration and navigation in unknown, GPS-denied indoor or urban environments using a swarm of robots equipped with directional sensors with limited sensing capabilities and limited computational resources. The robots have no a priori knowledge of the environment and need to rapidly explore and construct a map in a distributed manner using existing landmarks, the presence of which can be detected using onboard senors, although little to no metric information (distance or bearing to the landmarks) is available. In order to correctly and effectively achieve this, the presence of a necessary density/distribution of landmarks is ensured by design of the urban/indoor environment. We thus address this problem in two phases: 1) During the design/construction of the urban/indoor environment we can ensure that sufficient landmarks are placed within the environment. To that end we develop a filtration-based approach for designing strategic placement of landmarks in an environment. 2) We develop a distributed algorithm using which a team of robots, with no a priori knowledge of the environment, can explore such an environment, construct a topological map requiring no metric/distance information, and use that map to navigate within the environment. This is achieved using a topological representation of the environment (called a Landmark Complex), instead of constructing a complete metric/pixel map. The representation is built by the robot as well as used by them for navigation through a balance between exploration and exploitation. We use tools from homology theory for identifying "holes" in the coverage/exploration of the unknown environment and hence guiding the robots towards achieving a complete exploration and mapping of the environment.