 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Just Drive": Colour Bias Mitigation for Semantic Segmentation in the Context of Urban Driving
Paper and Code
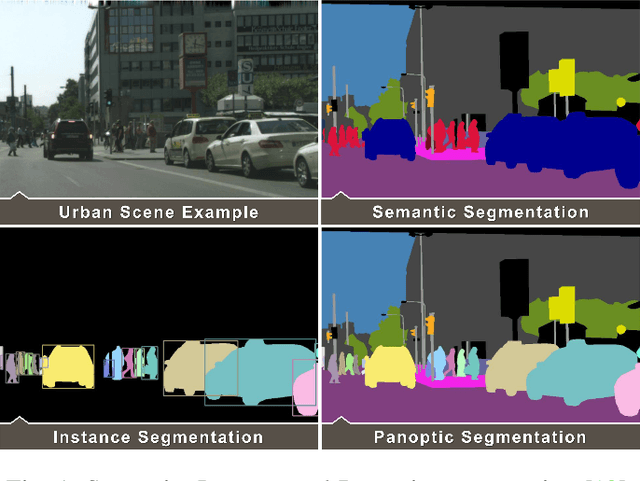


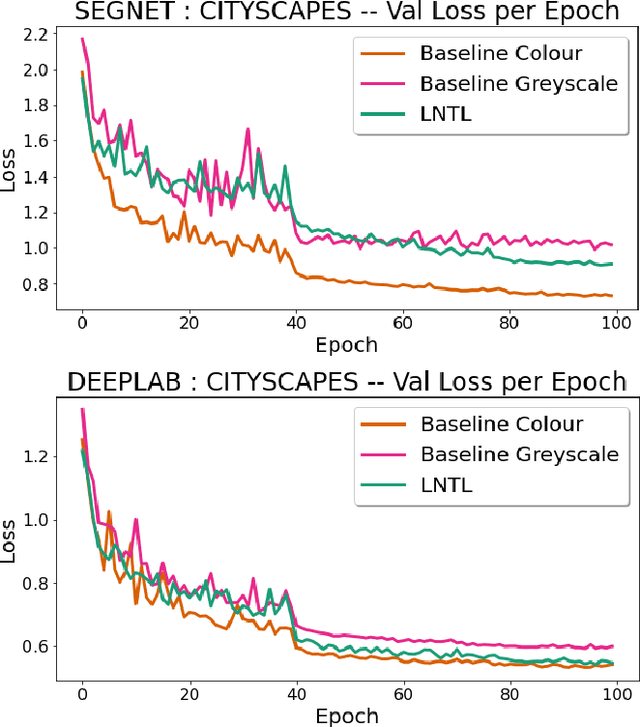
Biases can filter into AI technology without our knowledge. Oftentimes, seminal deep learning networks champion increased accuracy above all else. In this paper, we attempt to alleviate biases encountered by semantic segmentation models in urban driving scenes, via an iteratively trained unlearning algorithm. Convolutional neural networks have been shown to rely on colour and texture rather than geometry. This raises issues when safety-critical applications, such as self-driving cars, encounter images with covariate shift at test time - induced by variations such as lighting changes or seasonality. Conceptual proof of bias unlearning has been shown on simple datasets such as MNIST. However, the strategy has never been applied to the safety-critical domain of pixel-wise semantic segmentation of highly variable training data - such as urban scenes. Trained models for both the baseline and bias unlearning scheme have been tested for performance on colour-manipulated validation sets showing a disparity of up to 85.50% in mIoU from the original RGB images - confirming segmentation networks strongly depend on the colour information in the training data to make their classification. The bias unlearning scheme shows improvements of handling this covariate shift of up to 61% in the best observed case - and performs consistently better at classifying the "human" and "vehicle" classes compared to the baseline model.