Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJointly Learning Spatial, Angular, and Temporal Information for Enhanced Lane Detection
Paper and Code
May 05, 2024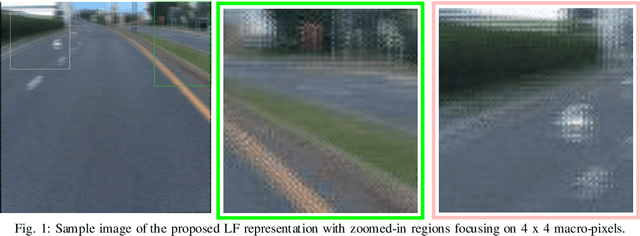
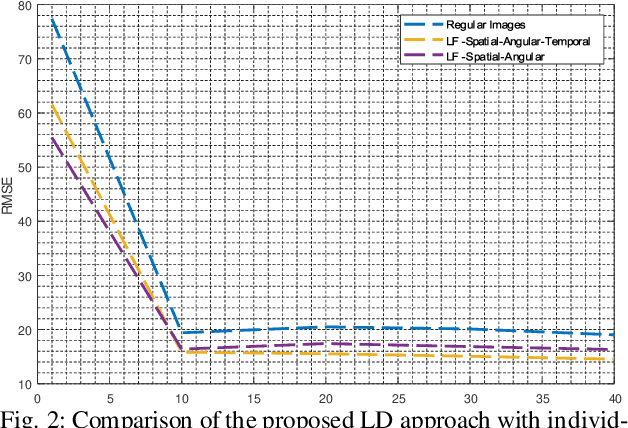
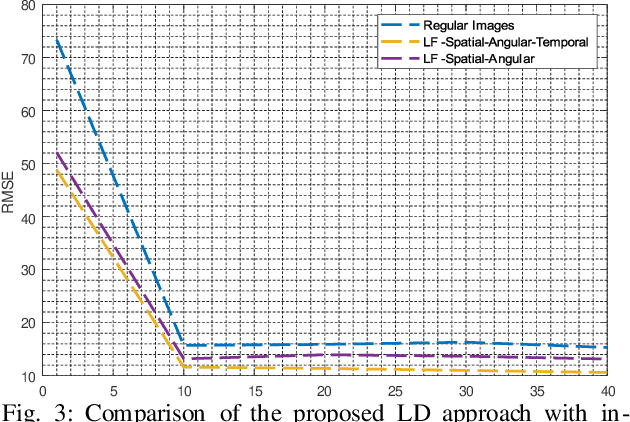
This paper introduces a novel approach for enhanced lane detection by integrating spatial, angular, and temporal information through light field imaging and novel deep learning models. Utilizing lenslet-inspired 2D light field representations and LSTM networks, our method significantly improves lane detection in challenging conditions. We demonstrate the efficacy of this approach with modified CNN architectures, showing superior per- formance over traditional methods. Our findings suggest this integrated data approach could advance lane detection technologies and inspire new models that leverage these multidimensional insights for autonomous vehicle percep- tion.
* 5 pages, 3 Figures , Accepted IEEE Conference on Signal Processing
and Communications Applications
View paper on