 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Point Cloud and Image Based Localization For Efficient Inspection in Mixed Reality
Paper and Code
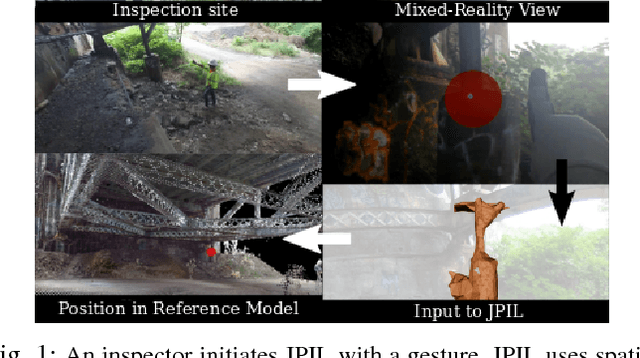
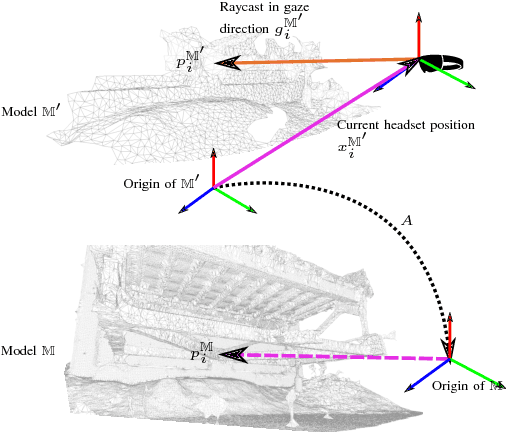
This paper introduces a method of structure inspection using mixed-reality headsets to reduce the human effort in reporting accurate inspection information such as fault locations in 3D coordinates. Prior to every inspection, the headset needs to be localized. While external pose estimation and fiducial marker based localization would require setup, maintenance, and manual calibration; marker-free self-localization can be achieved using the onboard depth sensor and camera. However, due to limited depth sensor range of portable mixed-reality headsets like Microsoft HoloLens, localization based on simple point cloud registration (sPCR) would require extensive mapping of the environment. Also, localization based on camera image would face the same issues as stereo ambiguities and hence depends on viewpoint. We thus introduce a novel approach to Joint Point Cloud and Image-based Localization (JPIL) for mixed-reality headsets that use visual cues and headset orientation to register small, partially overlapped point clouds and save significant manual labor and time in environment mapping. Our empirical results compared to sPCR show average 10 fold reduction of required overlap surface area that could potentially save on average 20 minutes per inspection. JPIL is not only restricted to inspection tasks but also can be essential in enabling intuitive human-robot interaction for spatial mapping and scene understanding in conjunction with other agents like autonomous robotic systems that are increasingly being deployed in outdoor environments for applications like structural inspection.