Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJenny 5 -- the robot
Paper and Code
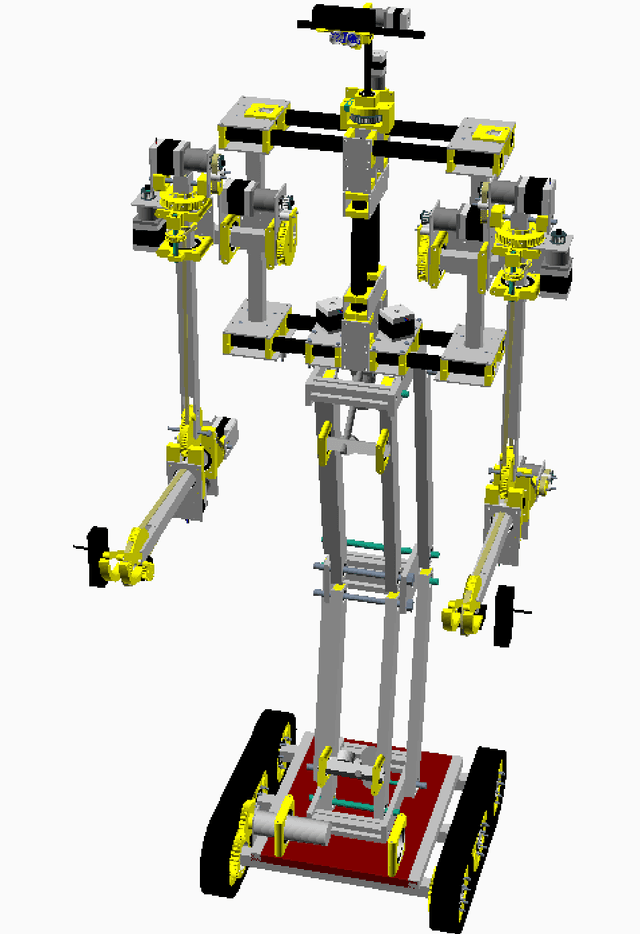
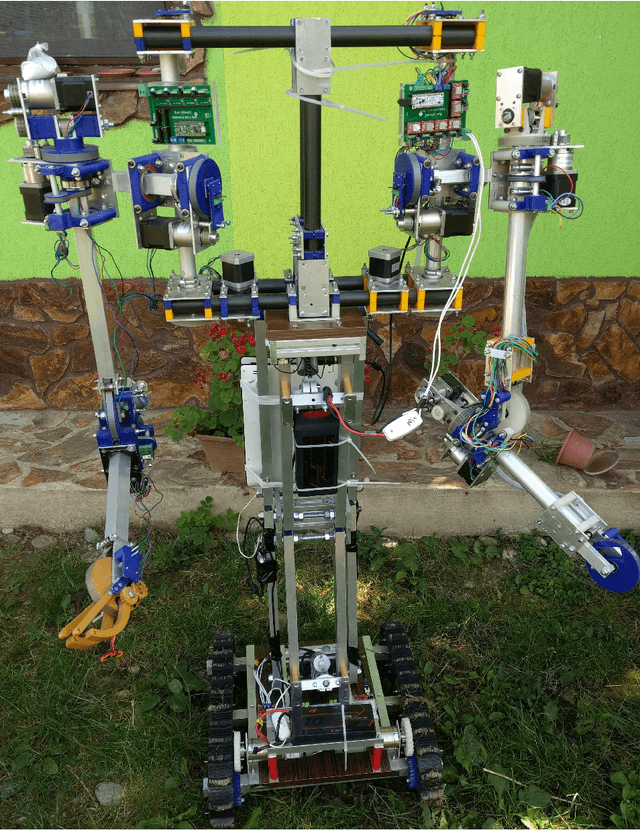
Jenny 5 is a fully open-source robot intended to be used mainly for research but can also act as a human assistant. It has a mobile platform with rubber tracks, a flexible leg, two arms with 7 degrees of freedom each and head with 2 degrees of freedom. The robot is actuated by 20 motors (DC, steppers and servos) and its state is read with the help of many sensors. The robot also has 3 webcams for computer vision tasks. In this paper the current state of the robot is described.
* 39 pages, 9 figures, 7 tables
View paper on