 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeiviz: A ROS Visualization App for Mobile Devices
Paper and Code

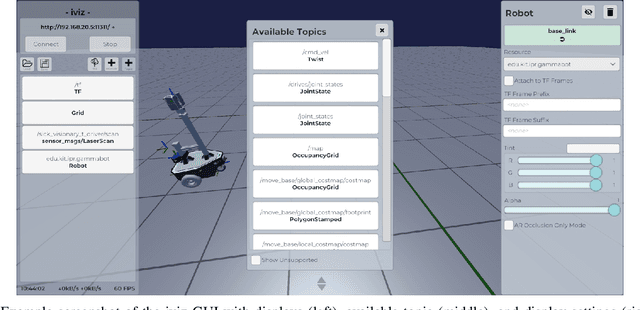
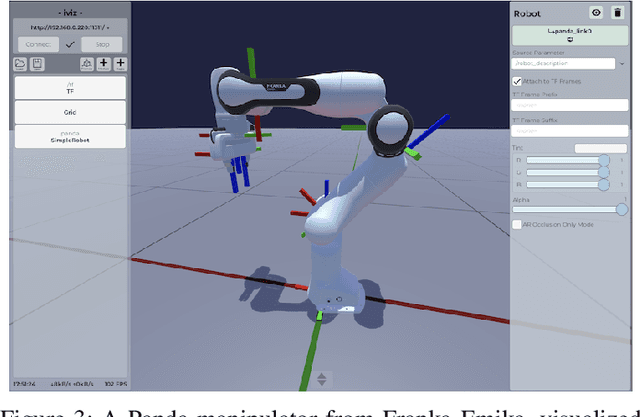

In this work, we introduce iviz, a mobile application for visualizing ROS data. In the last few years, the popularity of ROS has grown enormously, making it the standard platform for open source robotic programming. A key reason for this success is the availability of polished, general-purpose modules for many tasks, such as localization, mapping, path planning, and quite importantly, data visualization. However, the availability of the latter is generally restricted to PCs with the Linux operating system. Thus, users that want to see what is happening in the system with a smartphone or a tablet are stuck with solutions such as screen mirroring or using web browser versions of rviz, which are difficult to interact with from a mobile interface. More importantly, this makes newer visualization modalities such as Augmented Reality impossible. Our application iviz, based on the Unity engine, addresses these issues by providing a visualization platform designed from scratch to be usable in mobile platforms, such as iOS, Android, and UWP, and including native support for Augmented Reality for all three platforms. If desired, it can also be used in a PC with Linux, Windows, or macOS without any changes.