Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse Kinematics as Low-Rank Euclidean Distance Matrix Completion
Paper and Code
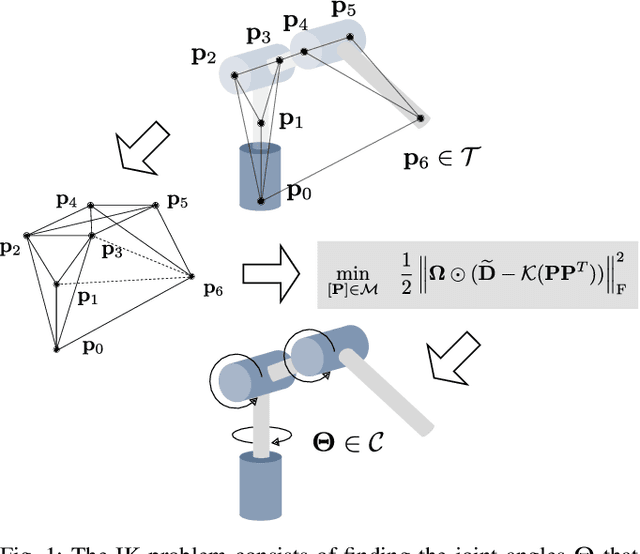
The majority of inverse kinematics (IK) algorithms search for solutions in a configuration space defined by joint angles. However, the kinematics of many robots can also be described in terms of distances between rigidly-attached points, which collectively form a Euclidean distance matrix. This alternative geometric description of the kinematics reveals an elegant equivalence between IK and the problem of low-rank matrix completion. We use this connection to implement a novel Riemannian optimization-based solution to IK for various articulated robots with symmetric joint angle constraints.
* 2 pages, 1 figure. Presented at the IROS 2020 workshop on bringing
geometric methods to robot learning, optimization and control
View paper on