 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse Graph Learning over Optimization Networks
Paper and Code
Dec 18, 2019

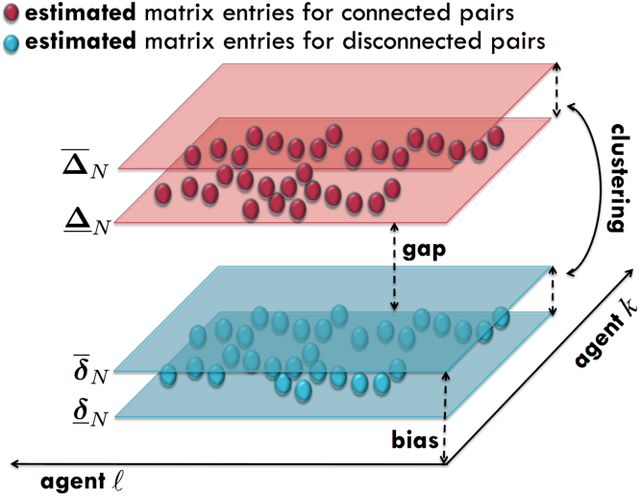
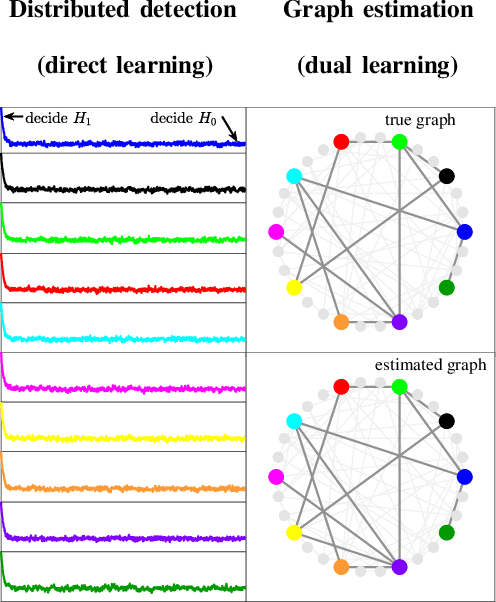
Many inferential and learning tasks can be accomplished efficiently by means of distributed optimization algorithms where the network topology plays a critical role in driving the local interactions among neighboring agents. There is a large body of literature examining the effect of the graph structure on the performance of optimization strategies. In this article, we examine the inverse problem and consider the reverse question: How much information does observing the behavior at the nodes convey about the underlying network structure used for optimization? Over large-scale networks, the difficulty of addressing such inverse questions (or problems) is compounded by the fact that usually only a limited portion of nodes can be probed, giving rise to a second important question: Despite the presence of several unobserved nodes, are partial and local observations still sufficient to discover the graph linking the probed nodes? The article surveys recent advances on this inverse learning problem and related questions. Examples of applications are provided to illustrate how the interplay between graph learning and distributed optimization arises in practice, e.g., in cognitive engineered systems such as distributed detection, or in other real-world problems such as the mechanism of opinion formation over social networks and the mechanism of coordination in biological networks. A unifying framework for examining the reconstruction error will be described, which allows to devise and examine various estimation strategies enabling successful graph learning. The relevance of specific network attributes, such as sparsity versus density of connections, and node degree concentration, is discussed in relation to the topology inference goal. It is shown how universal (i.e., data-driven) clustering algorithms can be exploited to solve the graph learning problem.