 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrinsic Motivation Driven Intuitive Physics Learning using Deep Reinforcement Learning with Intrinsic Reward Normalization
Paper and Code
Jul 06, 2019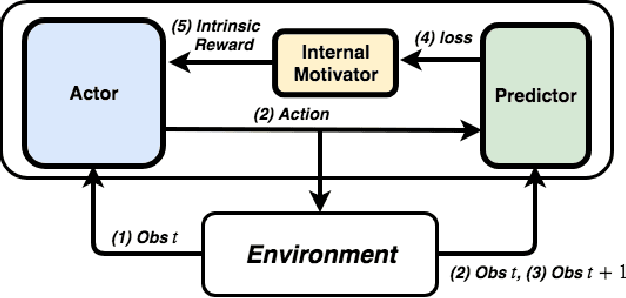

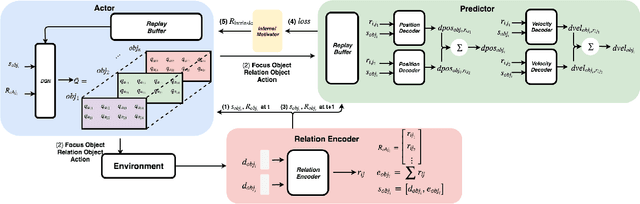
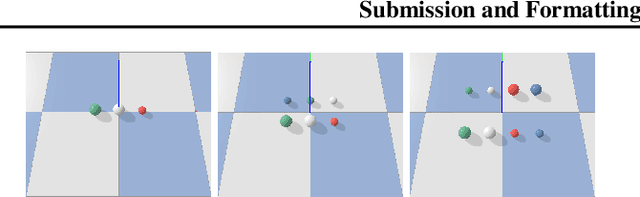
At an early age, human infants are able to learn and build a model of the world very quickly by constantly observing and interacting with objects around them. One of the most fundamental intuitions human infants acquire is intuitive physics. Human infants learn and develop these models, which later serve as prior knowledge for further learning. Inspired by such behaviors exhibited by human infants, we introduce a graphical physics network integrated with deep reinforcement learning. Specifically, we introduce an intrinsic reward normalization method that allows our agent to efficiently choose actions that can improve its intuitive physics model the most. Using a 3D physics engine, we show that our graphical physics network is able to infer object's positions and velocities very effectively, and our deep reinforcement learning network encourages an agent to improve its model by making it continuously interact with objects only using intrinsic motivation. We experiment our model in both stationary and non-stationary state problems and show benefits of our approach in terms of the number of different actions the agent performs and the accuracy of agent's intuition model. Videos are at https://www.youtube.com/watch?v=pDbByp91r3M&t=2s