 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Reinforcement Learning with Dynamic Reuse of Prior Knowledge from Human/Agent's Demonstration
Paper and Code
May 11, 2018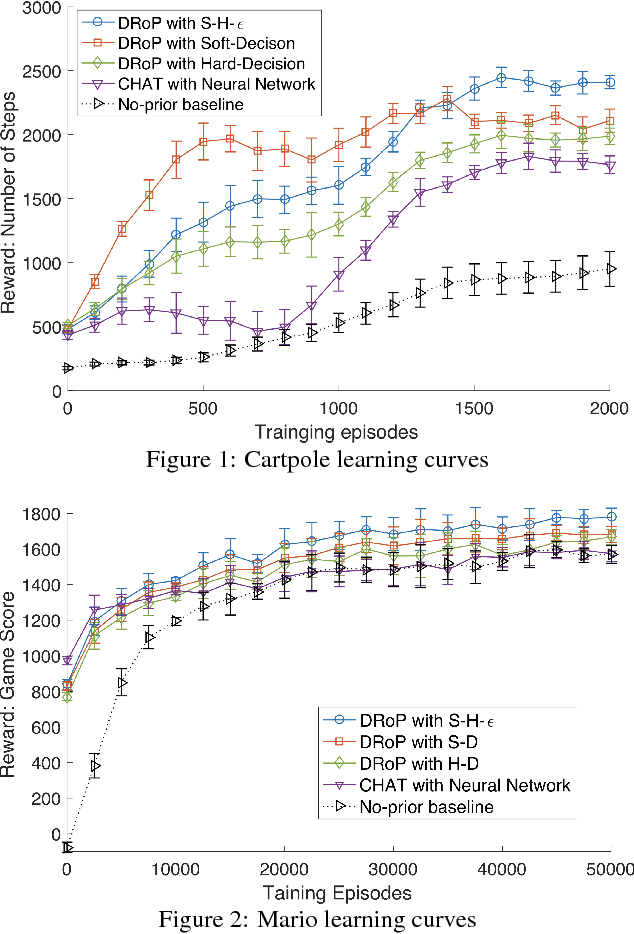
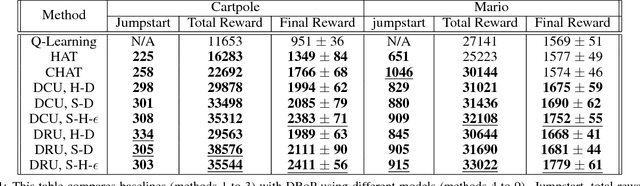

Reinforcement learning has enjoyed multiple successes in recent years. However, these successes typically require very large amounts of data before an agent achieves acceptable performance. This paper introduces a novel way of combating such requirements by leveraging existing (human or agent) knowledge. In particular, this paper uses demonstrations from agents and humans, allowing an untrained agent to quickly achieve high performance. We empirically compare with, and highlight the weakness of, HAT and CHAT, methods of transferring knowledge from a source agent/human to a target agent. This paper introduces an effective transfer approach, DRoP, combining the offline knowledge (demonstrations recorded before learning) with online confidence-based performance analysis. DRoP dynamically involves the demonstrator's knowledge, integrating it into the reinforcement learning agent's online learning loop to achieve efficient and robust learning.