 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Open-Ended Learning for 3D Object Recognition
Paper and Code
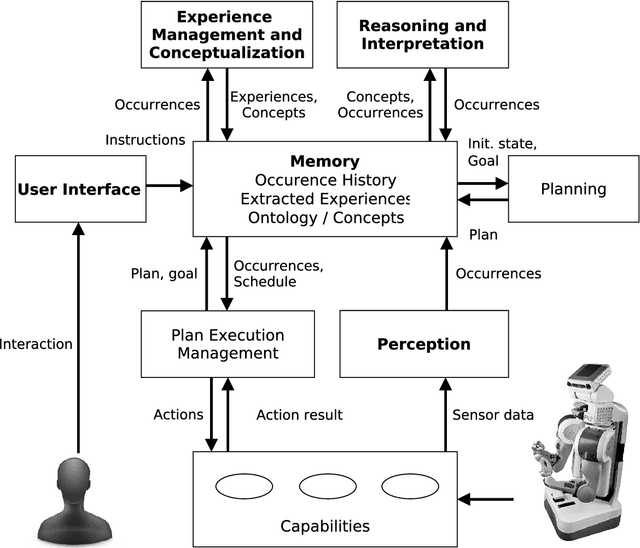
The thesis contributes in several important ways to the research area of 3D object category learning and recognition. To cope with the mentioned limitations, we look at human cognition, in particular at the fact that human beings learn to recognize object categories ceaselessly over time. This ability to refine knowledge from the set of accumulated experiences facilitates the adaptation to new environments. Inspired by this capability, we seek to create a cognitive object perception and perceptual learning architecture that can learn 3D object categories in an open-ended fashion. In this context, ``open-ended'' implies that the set of categories to be learned is not known in advance, and the training instances are extracted from actual experiences of a robot, and thus become gradually available, rather than being available since the beginning of the learning process. In particular, this architecture provides perception capabilities that will allow robots to incrementally learn object categories from the set of accumulated experiences and reason about how to perform complex tasks. This framework integrates detection, tracking, teaching, learning, and recognition of objects. An extensive set of systematic experiments, in multiple experimental settings, was carried out to thoroughly evaluate the described learning approaches. Experimental results show that the proposed system is able to interact with human users, learn new object categories over time, as well as perform complex tasks. The contributions presented in this thesis have been fully implemented and evaluated on different standard object and scene datasets and empirically evaluated on different robotic platforms.