Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Execution through Plan Analysis
Paper and Code
Mar 18, 2024
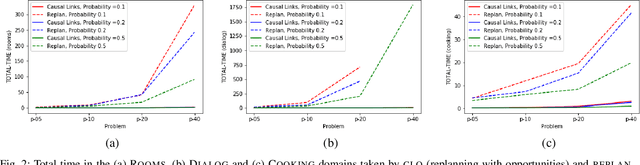


Intelligent robots need to generate and execute plans. In order to deal with the complexity of real environments, planning makes some assumptions about the world. When executing plans, the assumptions are usually not met. Most works have focused on the negative impact of this fact and the use of replanning after execution failures. Instead, we focus on the positive impact, or opportunities to find better plans. When planning, the proposed technique finds and stores those opportunities. Later, during execution, the monitoring system can use them to focus perception and repair the plan, instead of replanning from scratch. Experiments in several paradigmatic robotic tasks show how the approach outperforms standard replanning strategies.
* Published at IROS 21, 6 pages
View paper on