 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Decision Control Approach for Cooperative Safety-Critical Payload Transport in a Cluttered Environment
Paper and Code
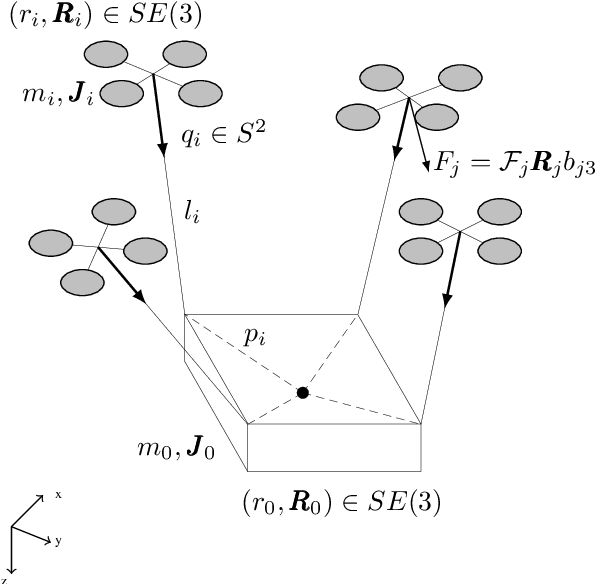
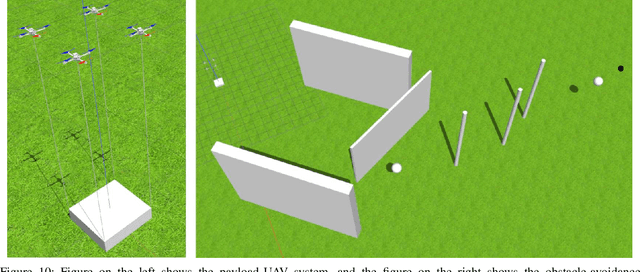
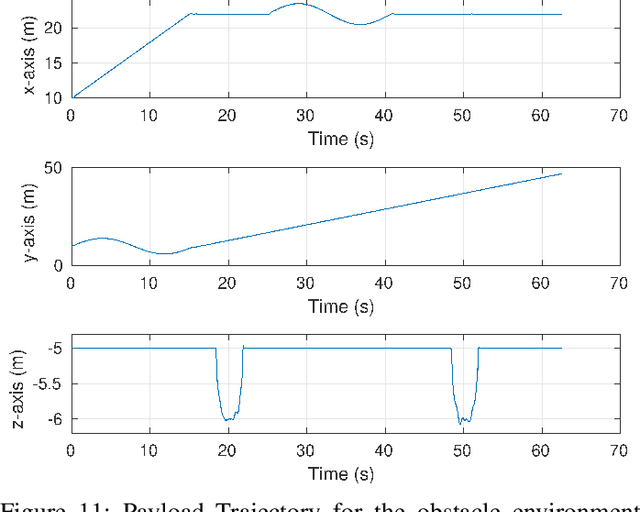
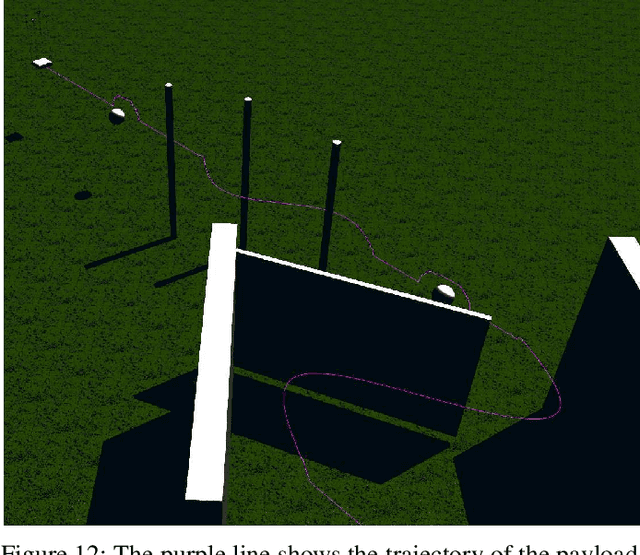
In this paper, the problem of coordinated transportation of heavy payload by a team of UAVs in a cluttered environment is addressed. The payload is modeled as a rigid body and is assumed to track a pre-computed global flight trajectory from a start point to a goal point. Due to the presence of local dynamic obstacles in the environment, the UAVs must ensure that there is no collision between the payload and these obstacles while ensuring that the payload oscillations are kept minimum. An Integrated Decision Controller (IDC) is proposed, that integrates the optimal tracking control law given by a centralized Model Predictive Controller with safety-critical constraints provided by the Exponential Control Barrier Functions. The entire payload-UAV system is enclosed by a safe convex hull boundary, and the IDC ensures that no obstacle enters this boundary. To evaluate the performance of the IDC, the results for a numerical simulation as well as a high-fidelity Gazebo simulation are presented. An ablation study is conducted to analyze the robustness of the proposed IDC against practical dubieties like noisy state values, relative obstacle safety margin, and payload mass uncertainty. The results clearly show that the IDC achieves both trajectory tracking and obstacle avoidance successfully while restricting the payload oscillations within a safe limit.