 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInsights on Evaluation of Camera Re-localization Using Relative Pose Regression
Paper and Code
Sep 23, 2020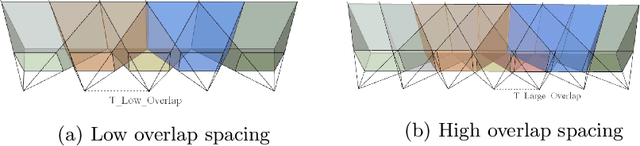
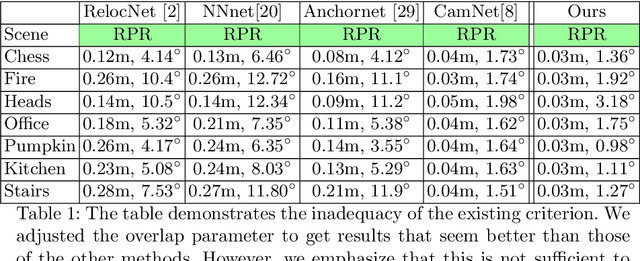
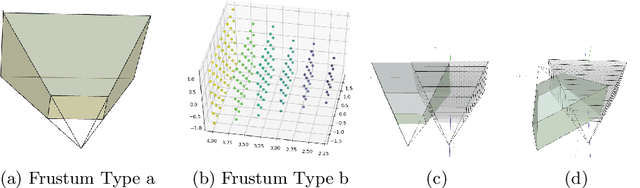
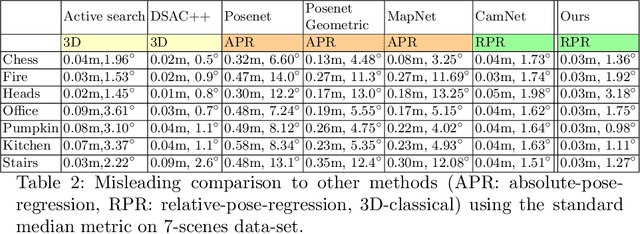
We consider the problem of relative pose regression in visual relocalization. Recently, several promising approaches have emerged in this area. We claim that even though they demonstrate on the same datasets using the same split to train and test, a faithful comparison between them was not available since on currently used evaluation metric, some approaches might perform favorably, while in reality performing worse. We reveal a tradeoff between accuracy and the 3D volume of the regressed subspace. We believe that unlike other relocalization approaches, in the case of relative pose regression, the regressed subspace 3D volume is less dependent on the scene and more affect by the method used to score the overlap, which determined how closely sampled viewpoints are. We propose three new metrics to remedy the issue mentioned above. The proposed metrics incorporate statistics about the regression subspace volume. We also propose a new pose regression network that serves as a new baseline for this task. We compare the performance of our trained model on Microsoft 7-Scenes and Cambridge Landmarks datasets both with the standard metrics and the newly proposed metrics and adjust the overlap score to reveal the tradeoff between the subspace and performance. The results show that the proposed metrics are more robust to different overlap threshold than the conventional approaches. Finally, we show that our network generalizes well, specifically, training on a single scene leads to little loss of performance on the other scenes.