 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation-Maximizing Sampling to Promote Tracking-by-Detection
Paper and Code
Jun 07, 2018

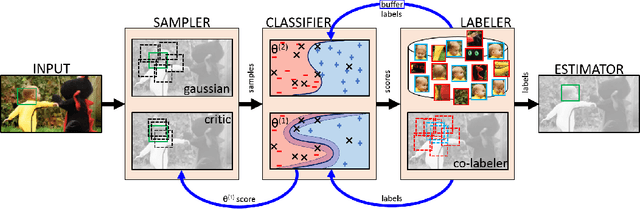
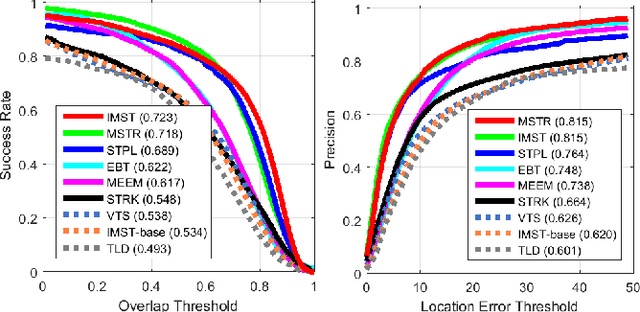
The performance of an adaptive tracking-by-detection algorithm not only depends on the classification and updating processes but also on the sampling. Typically, such trackers select their samples from the vicinity of the last predicted object location, or from its expected location using a pre-defined motion model, which does not exploit the contents of the samples nor the information provided by the classifier. We introduced the idea of most informative sampling, in which the sampler attempts to select samples that trouble the classifier of a discriminative tracker. We then proposed an active discriminative co-tracker that embed an adversarial sampler to increase its robustness against various tracking challenges. Experiments show that our proposed tracker outperforms state-of-the-art trackers on various benchmark videos.