Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial Line-Of-Sight Stabilization Using a 3-DOF Spherical Parallel Manipulator with Coaxial Input Shafts
Paper and Code
Dec 05, 2023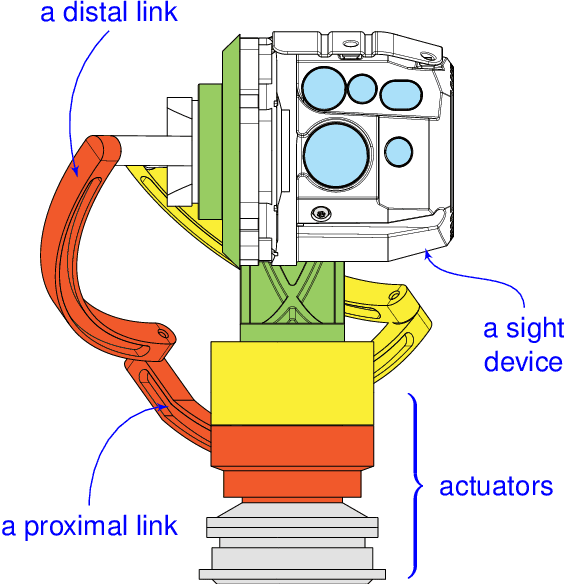
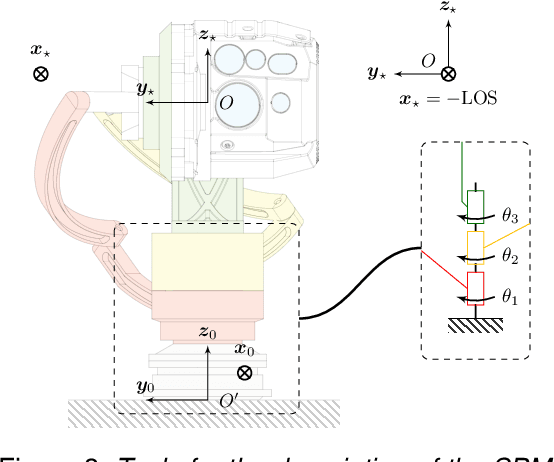
This article dives into the use of a 3-RRR Spherical Parallel Manipulator (SPM) for the purpose of inertial Line Of Sight (LOS) stabilization. Such a parallel robot provides three Degrees of Freedom (DOF) in orientation and is studied from the kinematic point of view. In particular, one guarantees that the singular loci (with the resulting numerical instabilities and inappropriate behavior of the mechanism) are far away from the prescribed workspace. Once the kinematics of the device is certified, a control strategy needs to be implemented in order to stabilize the LOS through the upper platform of the mechanism. Such a work is done with MATLAB Simulink using a SimMechanics model of our robot.
* OPTRO Conference 2024 (11th International Symposium on Optronics in
Defense & Security, 2024), 11 pages, 16 figures
View paper on