Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncorporating Transformer and LSTM to Kalman Filter with EM algorithm for state estimation
Paper and Code
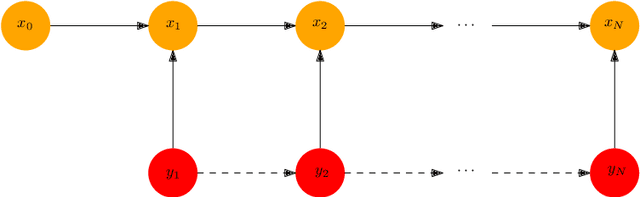
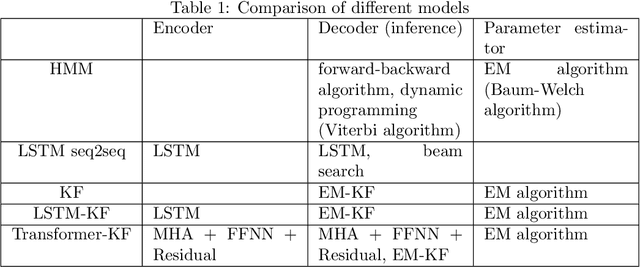
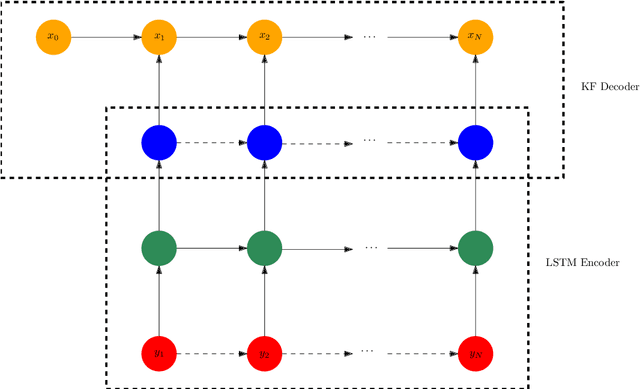

Kalman Filter requires the true parameters of the model and solves optimal state estimation recursively. Expectation Maximization (EM) algorithm is applicable for estimating the parameters of the model that are not available before Kalman filtering, which is EM-KF algorithm. To improve the preciseness of EM-KF algorithm, the author presents a state estimation method by combining the Long-Short Term Memory network (LSTM), Transformer and EM-KF algorithm in the framework of Encoder-Decoder in Sequence to Sequence (seq2seq). Simulation on a linear mobile robot model demonstrates that the new method is more accurate. Source code of this paper is available at https://github.com/zshicode/Deep-Learning-Based-State-Estimation.
View paper on