 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of Surface Reflections in Maritime Obstacle Detection
Paper and Code
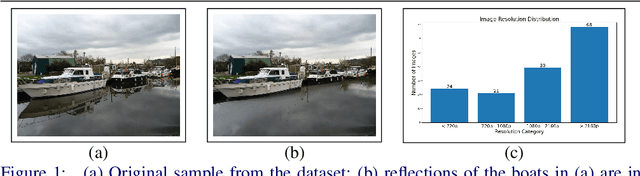
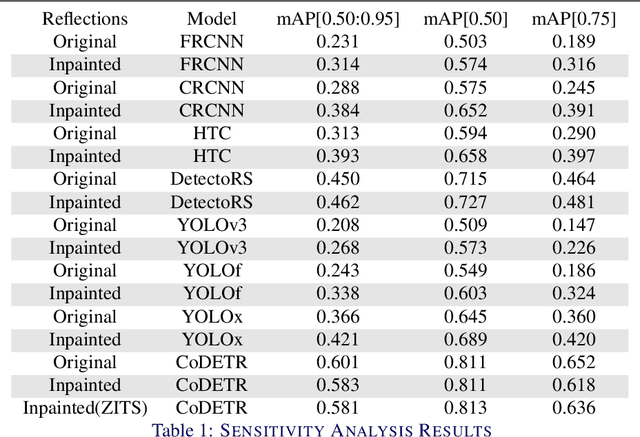
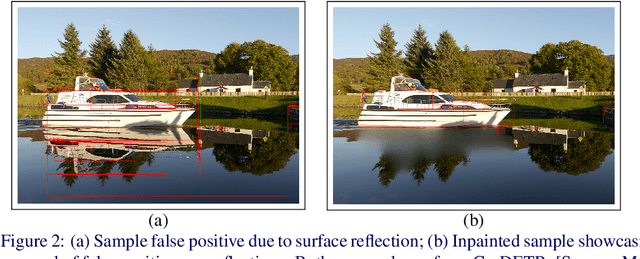
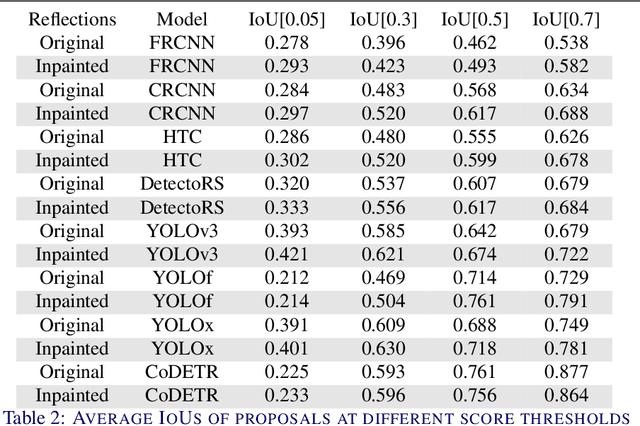
Maritime obstacle detection aims to detect possible obstacles for autonomous driving of unmanned surface vehicles. In the context of maritime obstacle detection, the water surface can act like a mirror on certain circumstances, causing reflections on imagery. Previous works have indicated surface reflections as a source of false positives for object detectors in maritime obstacle detection tasks. In this work, we show that surface reflections indeed adversely affect detector performance. We measure the effect of reflections by testing on two custom datasets, which we make publicly available. The first one contains imagery with reflections, while in the second reflections are inpainted. We show that the reflections reduce mAP by 1.2 to 9.6 points across various detectors. To remove false positives on reflections, we propose a novel filtering approach named Heatmap Based Sliding Filter. We show that the proposed method reduces the total number of false positives by 34.64% while minimally affecting true positives. We also conduct qualitative analysis and show that the proposed method indeed removes false positives on the reflections. The datasets can be found on https://github.com/SamedYalcin/MRAD.