 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact Mitigation for Dynamic Legged Robots with Steel Wire Transmission Using Nonlinear Active Compliance Control
Paper and Code
Aug 03, 2021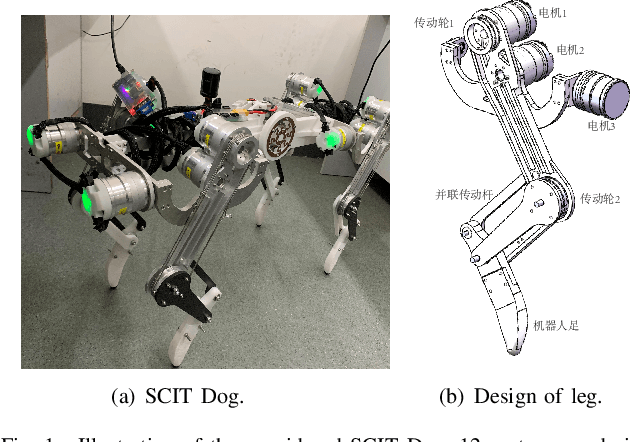
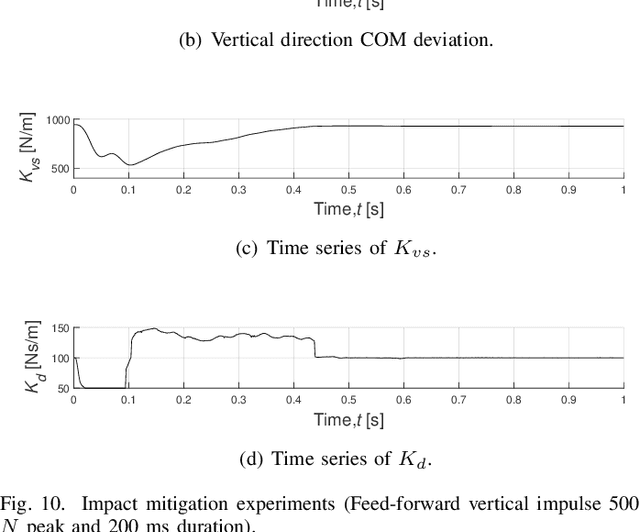
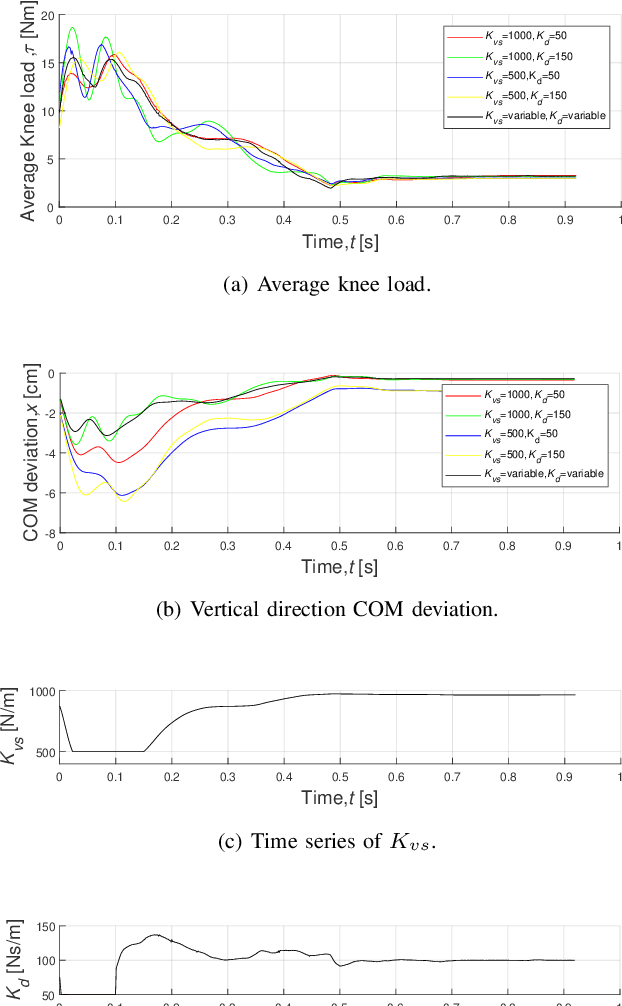
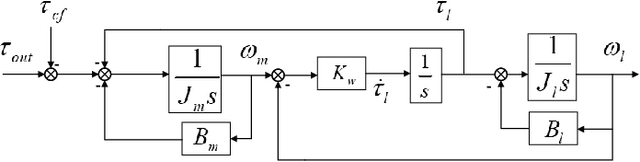
Impact mitigation is crucial to the stable locomotion of legged robots, especially in high-speed dynamic locomotion. This paper presents a leg locomotion system including the nonlinear active compliance control and the active impedance control for the steel wire transmission-based legged robot. The developed control system enables high-speed dynamic locomotion with excellent impact mitigation and leg position tracking performance, where three strategies are applied. a) The feed-forward controller is designed according to the linear motor-leg model with the information of Coulomb friction and viscous friction. b) Steel wire transmission model-based compensation guarantees ideal virtual spring compliance characteristics. c) Nonlinear active compliance control and active impedance control ensure better impact mitigation performance than linear scheme and guarantee position tracking performance. The proposed control system is verified on a real robot named SCIT Dog and the experiment demonstrates the ideal impact mitigation ability in high-speed dynamic locomotion without any passive spring mechanism.