 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman and Multi-Agent collaboration in a human-MARL teaming framework
Paper and Code
Jun 12, 2020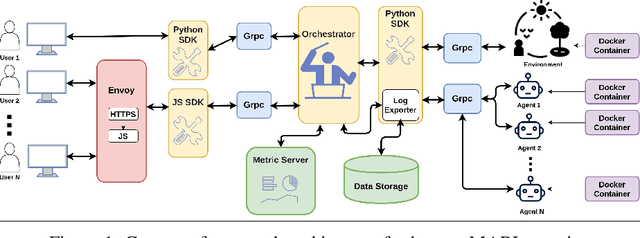
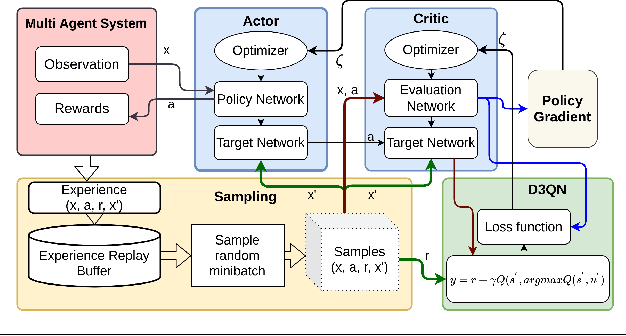
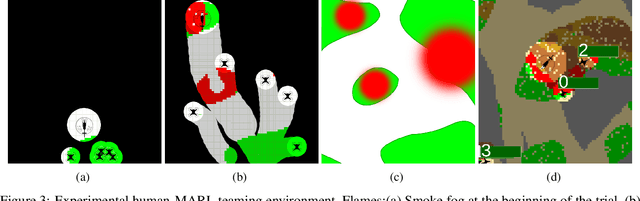
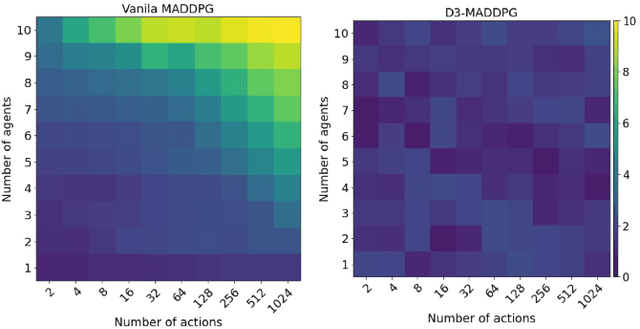
Collaborative multi-agent reinforcement learning (MARL) as a specific category of reinforcement learning provides effective results with agents learning from their observations, received rewards, and internal interactions between agents. However, centralized learning methods with a joint global policy in a highly dynamic environment present unique challenges in dealing with large amounts of information. This study proposes two innovative solutions to address the complexities of a collaboration between a human and multiple reinforcement learning (RL)-based agents (referred to thereafter as Human-MARL teaming) where the goals pursued cannot be achieved by a human alone or agents alone. The first innovation is the introduction of a new open-source MARL framework, called COGMENT, to unite humans and agents in real-time complex dynamic systems and efficiently leverage their interactions as a source of learning. The second innovation is our proposal of a new hybrid MARL method, named Dueling Double Deep Q learning MADDPG (D3-MADDPG) to allow agents to train decentralized policies parallelly in a joint centralized policy. This method can solve the overestimation problem in Q-learning methods of value-based MARL. We demonstrate these innovations by using a designed real-time environment with unmanned aerial vehicles driven by RL agents, collaborating with a human to fight fires. The team of RL agent drones autonomously look for fire seats and the human pilot douses the fires. The results of this study show that the proposed collaborative paradigm and the open-source framework leads to significant reductions in both human effort and exploration costs. Also, the results of the proposed hybrid MARL method shows that it effectively improves the learning process to achieve more reliable Q-values for each action, by decoupling the estimation between state value and advantage value.