 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHM-DDP: A Hybrid Multiple-shooting Differential Dynamic Programming Method for Constrained Trajectory Optimization
Paper and Code
Sep 15, 2021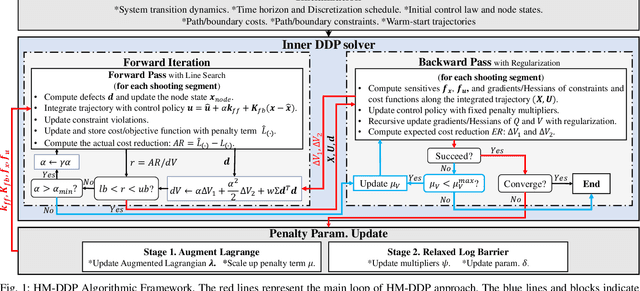
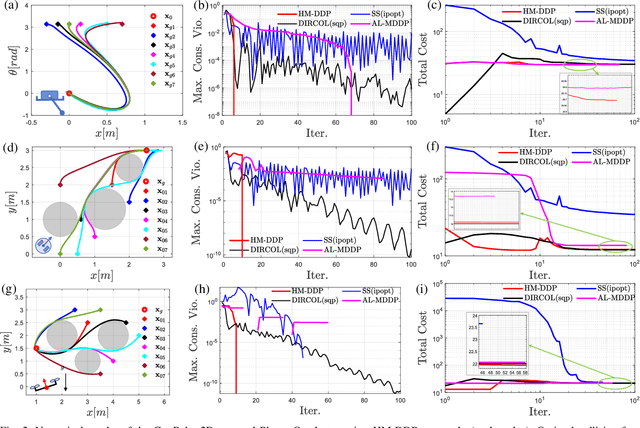
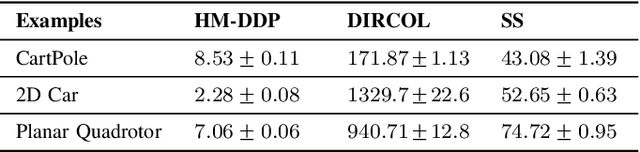
Trajectory optimization has been used extensively in robotic systems. In particular, Differential Dynamic Programming (DDP) has performed well as an off-line planner or an online nonlinear model predictive control solver, with a lower computational cost compared with other general-purpose nonlinear programming solvers. However, standard DDP cannot handle any constraints or perform reasonable initialization of a state trajectory. In this paper, we propose a hybrid constrained DDP variant with a multiple-shooting framework. The main technical contributions are twofold: 1) In addition to inheriting the simplicity of the initialization in multiple shooting, a two-stage framework is developed to deal with state and control inequality constraints robustly without loss of the linear feedback term of DDP. Such a hybrid strategy offers a fast convergence of constraint satisfaction. 2) An improved globalization strategy is proposed to exploit the coupled effects between line-searching and regularization, which is able to enhance the numerical robustness of DDP-like approaches. Our approach is tested on three constrained trajectory optimization problems with nonlinear inequality constraints and outperforms the commonly-used collocation and shooting methods in terms of runtime and constraint satisfaction.