 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Speed Emulation in a Vehicle-in-the-Loop Driving Simulator
Paper and Code
Mar 21, 2022


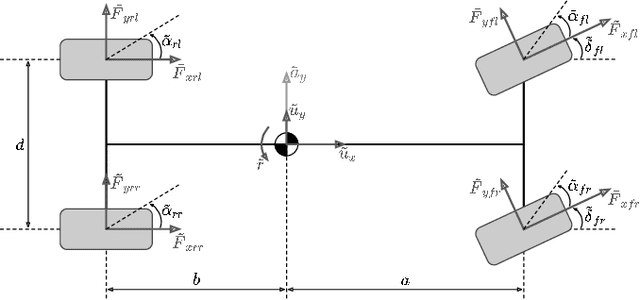
Rendering accurate multisensory feedback is critical to ensure natural user behavior in driving simulators. In this work, we present a virtual reality (VR)-based Vehicle-in-the-Loop (ViL) simulator that provides visual, vestibular, and haptic feedback to drivers in high speed driving conditions. Designing our simulator around a four-wheel steer-by-wire vehicle enables us to emulate the dynamics of a vehicle traveling significantly faster than the test vehicle and to transmit corresponding haptic steering feedback to the driver. By scaling the speed of the test vehicle through a combination of VR visuals, vehicle dynamics emulation, and steering wheel force feedback, we can safely and immersively run experiments up to highway speeds within a limited driving space. In double lane change and highway weaving experiments, our high speed emulation method tracks yaw motion within human perception limits and provides sensory feedback comparable to the same maneuvers driven manually.