 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-performance Racing on Unmapped Tracks using Local Maps
Paper and Code
Jan 31, 2024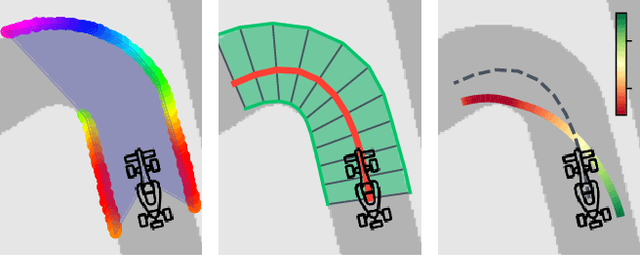



Map-based methods for autonomous racing estimate the vehicle's location, which is used to follow a high-level plan. While map-based optimisation methods demonstrate high-performance results, they are limited by requiring a map of the environment. In contrast, mapless methods can operate in unmapped contexts since they directly process raw sensor data (often LiDAR) to calculate commands. However, a major limitation in mapless methods is poor performance due to a lack of optimisation. In response, we propose the local map framework that uses easily extractable, low-level features to build local maps of the visible region that form the input to optimisation-based controllers. Our local map generation extracts the visible racetrack boundaries and calculates a centreline and track widths used for planning. We evaluate our method for simulated F1Tenth autonomous racing using a two-stage trajectory optimisation and tracking strategy and a model predictive controller. Our method achieves lap times that are 8.8% faster than the Follow-The-Gap method and 3.22% faster than end-to-end neural networks due to the optimisation resulting in a faster speed profile. The local map planner is 3.28% slower than global methods that have access to an entire map of the track that can be used for planning. Critically, our approach enables high-speed autonomous racing on unmapped tracks, achieving performance similar to global methods without requiring a track map.