 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Level Path Planning with Uncertainty
Paper and Code
Mar 20, 2013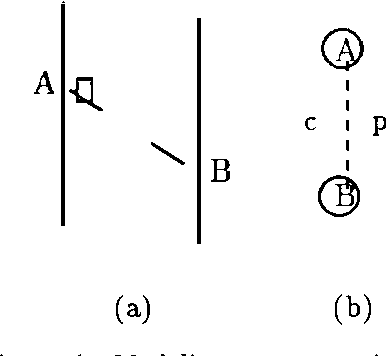
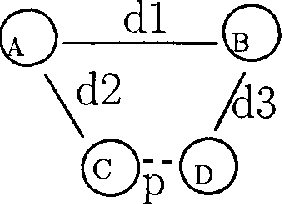
For high level path planning, environments are usually modeled as distance graphs, and path planning problems are reduced to computing the shortest path in distance graphs. One major drawback of this modeling is the inability to model uncertainties, which are often encountered in practice. In this paper, a new tool, called U-yraph, is proposed for environment modeling. A U-graph is an extension of distance graphs with the ability to handle a kind of uncertainty. By modeling an uncertain environment as a U-graph, and a navigation problem as a Markovian decision process, we can precisely define a new optimality criterion for navigation plans, and more importantly, we can come up with a general algorithm for computing optimal plans for navigation tasks.