 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Reinforcement Learning via Advantage-Weighted Information Maximization
Paper and Code
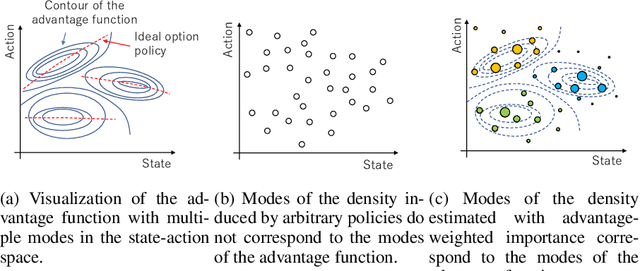
Real-world tasks are often highly structured. Hierarchical reinforcement learning (HRL) has attracted research interest as an approach for leveraging the hierarchical structure of a given task in reinforcement learning (RL). However, identifying the hierarchical policy structure that enhances the performance of RL is not a trivial task. In this paper, we propose an HRL method that learns a latent variable of a hierarchical policy using mutual information maximization. Our approach can be interpreted as a way to learn a discrete and latent representation of the state-action space. To learn option policies that correspond to modes of the advantage function, we introduce advantage-weighted importance sampling. In our HRL method, the gating policy learns to select option policies based on an option-value function, and these option policies are optimized based on the deterministic policy gradient method. This framework is derived by leveraging the analogy between a monolithic policy in standard RL and a hierarchical policy in HRL by using a deterministic option policy. Experimental results indicate that our HRL approach can learn a diversity of options and that it can enhance the performance of RL in continuous control tasks.