 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHazard analysis of human--robot interactions with HAZOP--UML
Paper and Code
Feb 09, 2016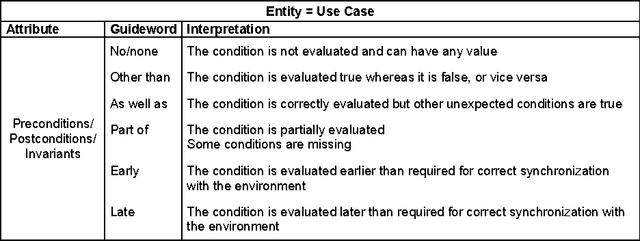
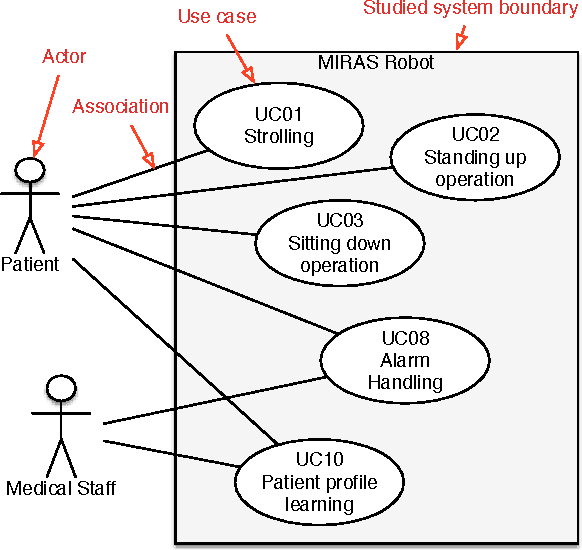
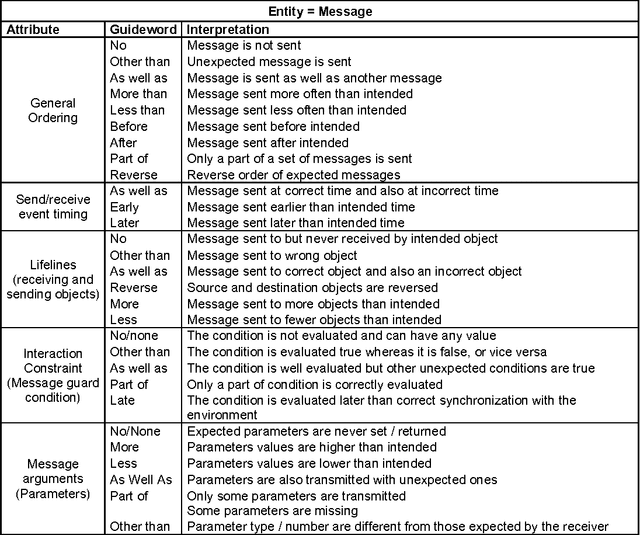

New safety critical systems are about to appear in our everyday life: advanced robots able to interact with humans and perform tasks at home, in hospitals , or at work. A hazardous behavior of those systems, induced by failures or extreme environment conditions, may lead to catastrophic consequences. Well-known risk analysis methods used in other critical domains (e.g., avion-ics, nuclear, medical, transportation), have to be extended or adapted due to the non-deterministic behavior of those systems, evolving in unstructured environments. One major challenge is thus to develop methods that can be applied at the very beginning of the development process, to identify hazards induced by robot tasks and their interactions with humans. In this paper we present a method which is based on an adaptation of a hazard identification technique, HAZOP (Hazard Operability), coupled with a system description notation, UML (Unified Modeling Language). This systematic approach has been applied successfully in research projects, and is now applied by robot manufacturers. Some results of those studies are presented and discussed to explain the benefits and limits of our method.