Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHapticLever: Kinematic Force Feedback using a 3D Pantograph
Paper and Code
Oct 04, 2022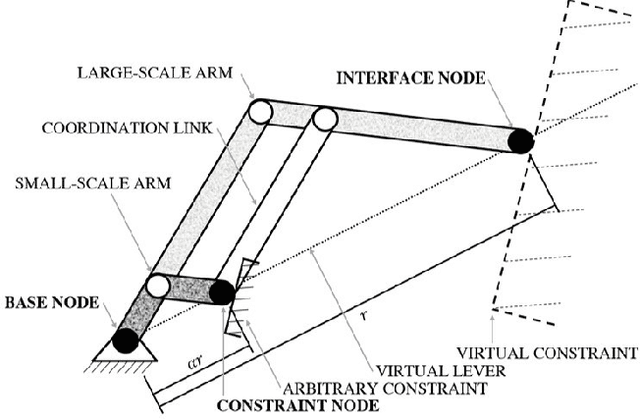
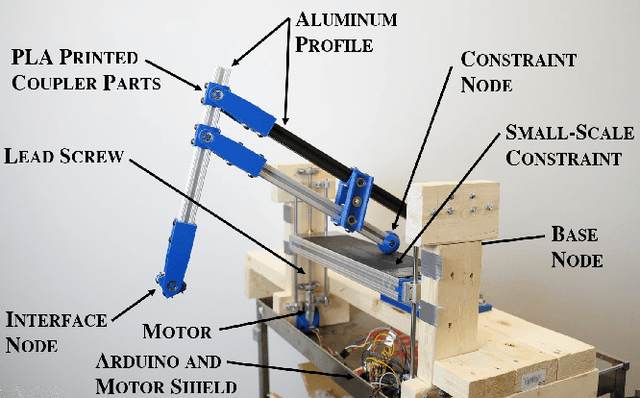
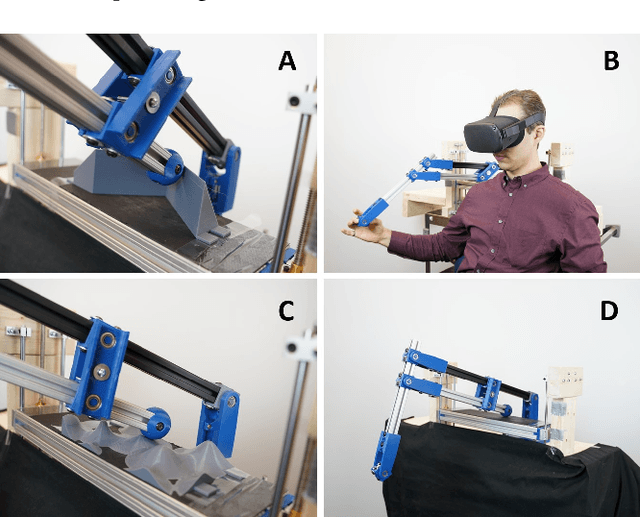
HapticLever is a new kinematic approach for VR haptics which uses a 3D pantograph to stiffly render large-scale surfaces using small-scale proxies. The HapticLever approach does not consume power to render forces, but rather puts a mechanical constraint on the end effector using a small-scale proxy surface. The HapticLever approach provides stiff force feedback when the user interacts with a static virtual surface, but allows the user to move their arm freely when moving through free virtual space. We present the problem space, the related work, and the HapticLever design approach.
* UIST 2022 Poster
View paper on