 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Assembly and Prototyping: An Expository Review
Paper and Code
Dec 03, 2017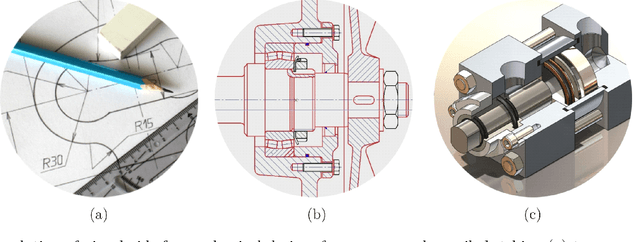


An important application of haptic technology to digital product development is in virtual prototyping (VP), part of which deals with interactive planning, simulation, and verification of assembly-related activities, collectively called virtual assembly (VA). In spite of numerous research and development efforts over the last two decades, the industrial adoption of haptic-assisted VP/VA has been slower than expected. Putting hardware limitations aside, the main roadblocks faced in software development can be traced to the lack of effective and efficient computational models of haptic feedback. Such models must 1) accommodate the inherent geometric complexities faced when assembling objects of arbitrary shape; and 2) conform to the computation time limitation imposed by the notorious frame rate requirements---namely, 1 kHz for haptic feedback compared to the more manageable 30-60 Hz for graphic rendering. The simultaneous fulfillment of these competing objectives is far from trivial. This survey presents some of the conceptual and computational challenges and opportunities as well as promising future directions in haptic-assisted VP/VA, with a focus on haptic assembly from a geometric modeling and spatial reasoning perspective. The main focus is on revisiting definitions and classifications of different methods used to handle the constrained multibody simulation in real-time, ranging from physics-based and geometry-based to hybrid and unified approaches using a variety of auxiliary computational devices to specify, impose, and solve assembly constraints. Particular attention is given to the newly developed 'analytic methods' inherited from motion planning and protein docking that have shown great promise as an alternative paradigm to the more popular combinatorial methods.