Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHand Orientation Estimation in Probability Density Form
Paper and Code
Jun 12, 2019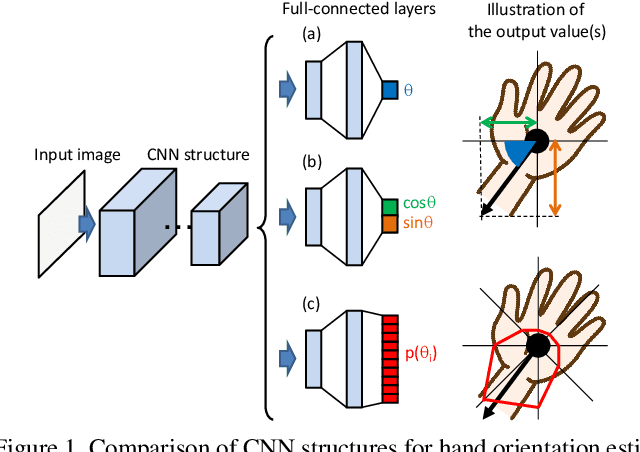

Hand orientation is an essential feature required to understand hand behaviors and subsequently support human activities. In this paper, we present a new method for estimating hand orientation in probability density form. It can solve the cyclicity problem in direct angular representation and enables the integration of multiple predictions based on different features. We validated the performance of the proposed method and an integration example using our dataset, which captured cooperative group work.
View paper on