 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgegym-DSSAT: a crop model turned into a Reinforcement Learning environment
Paper and Code
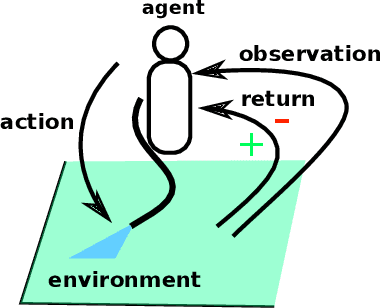
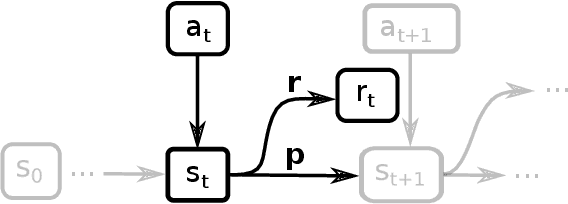
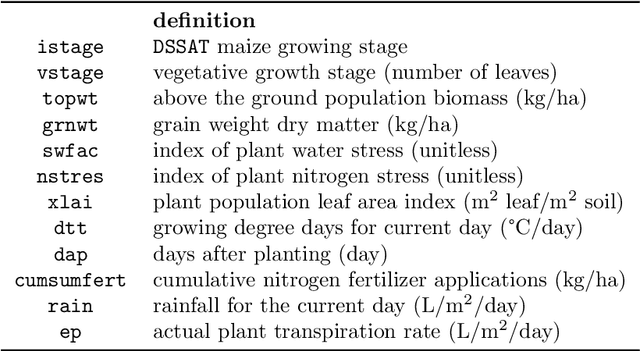
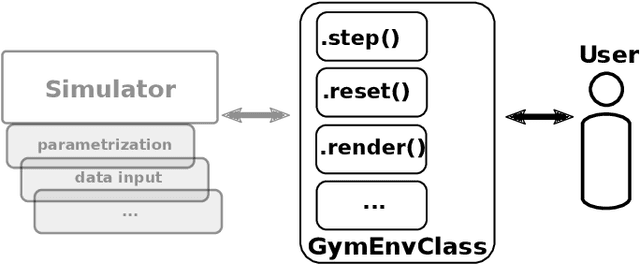
Addressing a real world sequential decision problem with Reinforcement Learning (RL) usually starts with the use of a simulated environment that mimics real conditions. We present a novel open source RL environment for realistic crop management tasks. gym-DSSAT is a gym interface to the Decision Support System for Agrotechnology Transfer (DSSAT), a high fidelity crop simulator. DSSAT has been developped over the last 30 years and is widely recognized by agronomists. gym-DSSAT comes with predefined simulations based on real world maize experiments. The environment is as easy to use as any gym environment. We provide performance baselines using basic RL algorithms. We also briefly outline how the monolithic DSSAT simulator written in Fortran has been turned into a Python RL environment. Our methodology is generic and may be applied to similar simulators. We report on very preliminary experimental results which suggest that RL can help researchers to improve sustainability of fertilization and irrigation practices.