 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGUI-based Pedicle Screw Planning on Fluoroscopic Images Utilizing Vertebral Segmentation
Paper and Code
Jul 11, 2024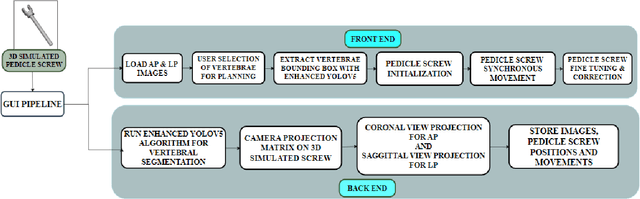
The proposed work establishes a novel Graphical User Interface (GUI) framework, primarily designed for intraoperative pedicle screw planning. Current planning workflow in Image Guided Surgeries primarily relies on pre-operative CT planning. Intraoperative CT planning can be time-consuming and expensive and thus is not a common practice. In situations where efficiency and cost-effectiveness are paramount, planning to utilize fluoroscopic images acquired for image registration emerges as the optimal choice. The methodology proposed in this study employs a simulated 3D pedicle screw to calculate its coronal and sagittal projections for pedicle screw planning using anterior-posterior (AP) and lateral (LP) images. The initialization and placement of pedicle screw is computed by utilizing the bounding box of vertebral segmentation, which is obtained by the application of enhanced YOLOv5. The GUI front end includes functionality that allows surgeons or medical practitioners to efficiently choose, set up, and dynamically maneuver the pedicle screw on AP and LP images. This is based on a novel feature called synchronous planning, which involves correlating pedicle screws from the coronal and sagittal planes. This correlation utilizes projective correspondence to ensure that any movement of the pedicle screw in either the AP or LP image will be reflected in the other image. The proposed GUI framework is a time-efficient and cost-effective tool for synchronizing and planning the movement of pedicle screws during intraoperative surgical procedures.