 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGROWL: Group Detection With Link Prediction
Paper and Code
Nov 08, 2021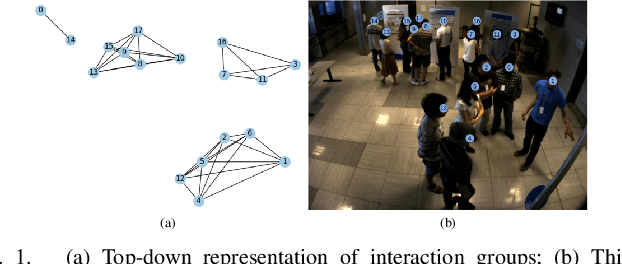
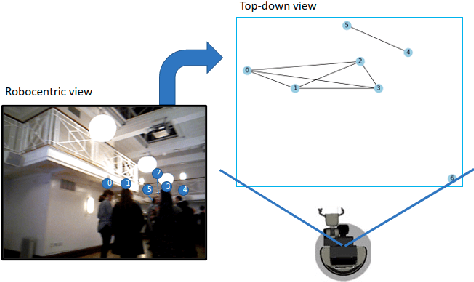
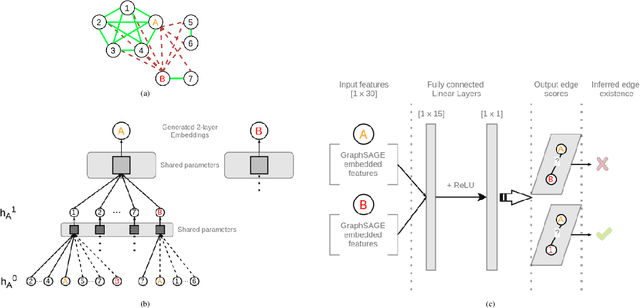
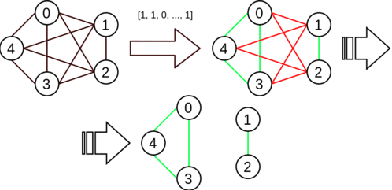
Interaction group detection has been previously addressed with bottom-up approaches which relied on the position and orientation information of individuals. These approaches were primarily based on pairwise affinity matrices and were limited to static, third-person views. This problem can greatly benefit from a holistic approach based on Graph Neural Networks (GNNs) beyond pairwise relationships, due to the inherent spatial configuration that exists between individuals who form interaction groups. Our proposed method, GROup detection With Link prediction (GROWL), demonstrates the effectiveness of a GNN based approach. GROWL predicts the link between two individuals by generating a feature embedding based on their neighbourhood in the graph and determines whether they are connected with a shallow binary classification method such as Multi-layer Perceptrons (MLPs). We test our method against other state-of-the-art group detection approaches on both a third-person view dataset and a robocentric (i.e., egocentric) dataset. In addition, we propose a multimodal approach based on RGB and depth data to calculate a representation GROWL can utilise as input. Our results show that a GNN based approach can significantly improve accuracy across different camera views, i.e., third-person and egocentric views.