 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasping as Inference: Reactive Grasping in Heavily Cluttered Environment
Paper and Code
Jun 03, 2022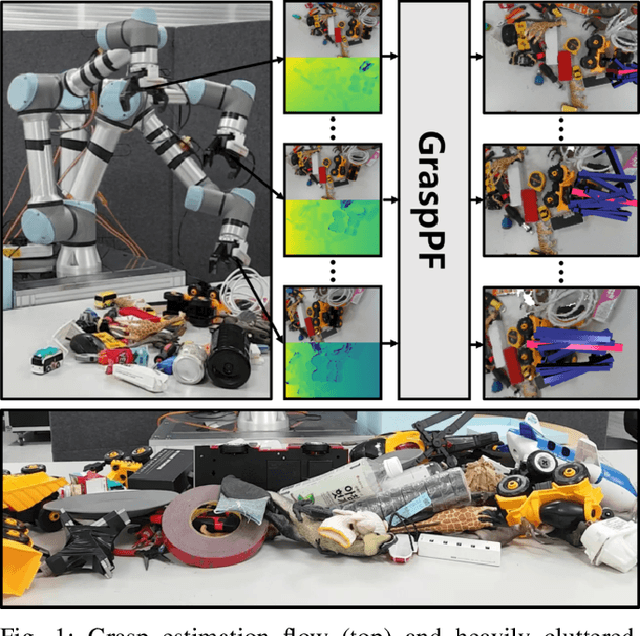
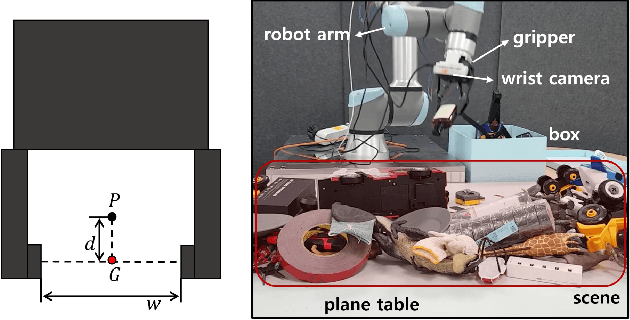


Although, in the task of grasping via a data-driven method, closed-loop feedback and predicting 6 degrees of freedom (DoF) grasp rather than conventionally used 4DoF top-down grasp are demonstrated to improve performance individually, few systems have both. Moreover, the sequential property of that task is hardly dealt with, while the approaching motion necessarily generates a series of observations. Therefore, this paper synthesizes three approaches and suggests a closed-loop framework that can predict the 6DoF grasp in a heavily cluttered environment from continuously received vision observations. This can be realized by formulating the grasping problem as Hidden Markov Model and applying a particle filter to infer grasp. Additionally, we introduce a novel lightweight Convolutional Neural Network (CNN) model that evaluates and initializes grasp samples in real-time, making the particle filter process possible. The experiments, which are conducted on a real robot with a heavily cluttered environment, show that our framework not only quantitatively improves the grasping success rate significantly compared to the baseline algorithms, but also qualitatively reacts to a dynamic change in the environment and cleans up the table.