 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRASP-Net: Geometric Residual Analysis and Synthesis for Point Cloud Compression
Paper and Code
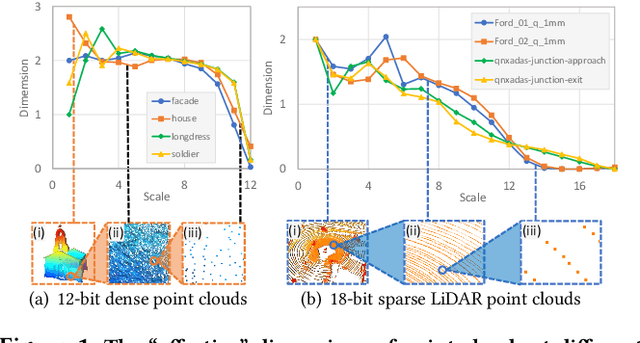

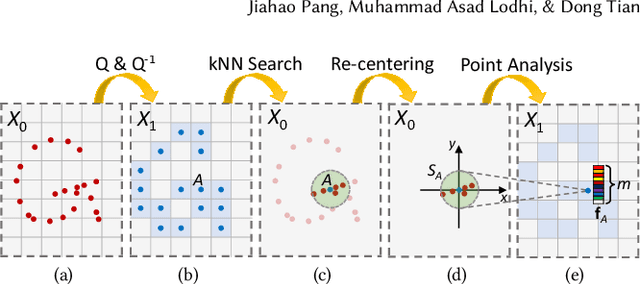
Point cloud compression (PCC) is a key enabler for various 3-D applications, owing to the universality of the point cloud format. Ideally, 3D point clouds endeavor to depict object/scene surfaces that are continuous. Practically, as a set of discrete samples, point clouds are locally disconnected and sparsely distributed. This sparse nature is hindering the discovery of local correlation among points for compression. Motivated by an analysis with fractal dimension, we propose a heterogeneous approach with deep learning for lossy point cloud geometry compression. On top of a base layer compressing a coarse representation of the input, an enhancement layer is designed to cope with the challenging geometric residual/details. Specifically, a point-based network is applied to convert the erratic local details to latent features residing on the coarse point cloud. Then a sparse convolutional neural network operating on the coarse point cloud is launched. It utilizes the continuity/smoothness of the coarse geometry to compress the latent features as an enhancement bit-stream that greatly benefits the reconstruction quality. When this bit-stream is unavailable, e.g., due to packet loss, we support a skip mode with the same architecture which generates geometric details from the coarse point cloud directly. Experimentation on both dense and sparse point clouds demonstrate the state-of-the-art compression performance achieved by our proposal. Our code is available at https://github.com/InterDigitalInc/GRASP-Net.