 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPU-Accelerated 3D Polygon Visibility Volumes for Synergistic Perception and Navigation
Paper and Code
Feb 05, 2024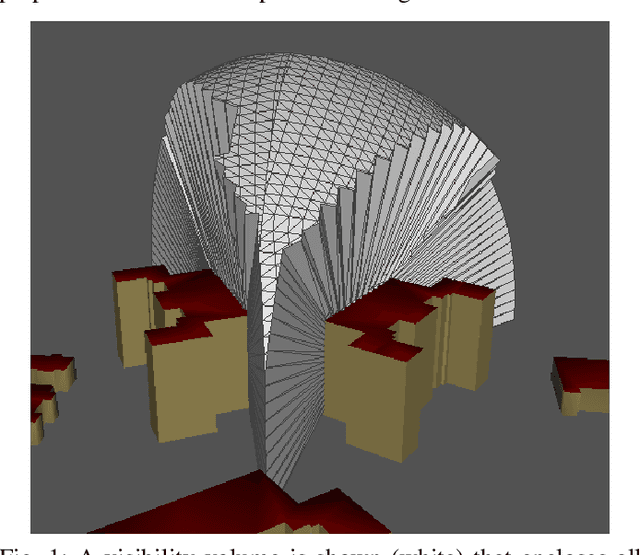
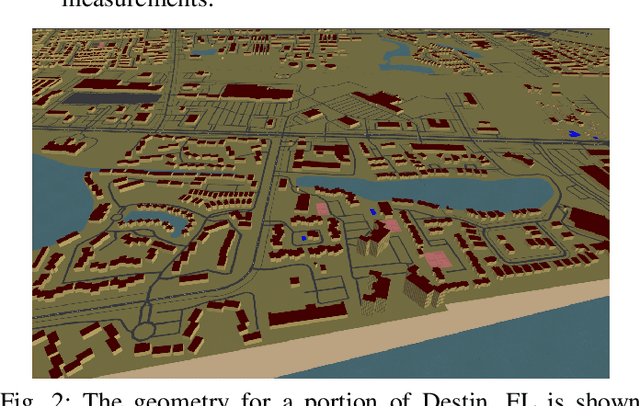
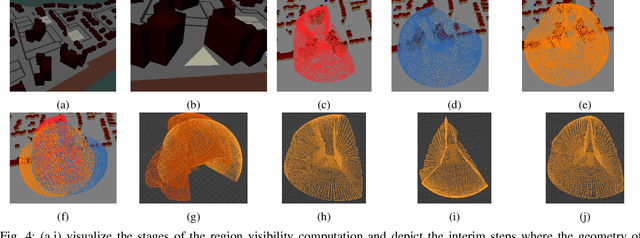
UAV missions often require specific geometric constraints to be satisfied between ground locations and the vehicle location. Such requirements are typical for contexts where line-of-sight must be maintained between the vehicle location and the ground control location and are also important in surveillance applications where the UAV wishes to be able to sense, e.g., with a camera sensor, a specific region within a complex geometric environment. This problem is further complicated when the ground location is generalized to a convex 2D polygonal region. This article describes the theory and implementation of a system which can quickly calculate the 3D volume that encloses all 3D coordinates from which a 2D convex planar region can be entirely viewed; referred to as a visibility volume. The proposed approach computes visibility volumes using a combination of depth map computation using GPU-acceleration and geometric boolean operations. Solutions to this problem require complex 3D geometric analysis techniques that must execute using arbitrary precision arithmetic on a collection of discontinuous and non-analytic surfaces. Post-processing steps incorporate navigational constraints to further restrict the enclosed coordinates to include both visibility and navigation constraints. Integration of sensing visibility constraints with navigational constraints yields a range of navigable space where a vehicle will satisfy both perceptual sensing and navigational needs of the mission. This algorithm then provides a synergistic perception and navigation sensitive solution yielding a volume of coordinates in 3D that satisfy both the mission path and sensing needs.