 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGood Feature Matching: Towards Accurate, Robust VO/VSLAM with Low Latency
Paper and Code
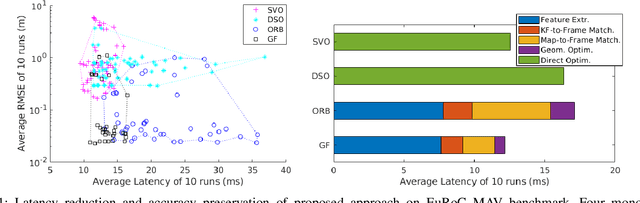

Analysis of state-of-the-art VO/VSLAM system exposes a gap in balancing performance (accuracy & robustness) and efficiency (latency). Feature-based systems exhibit good performance, yet have higher latency due to explicit data association; direct & semidirect systems have lower latency, but are inapplicable in some target scenarios or exhibit lower accuracy than feature-based ones. This paper aims to fill the performance-efficiency gap with an enhancement applied to feature-based VSLAM. We present good feature matching, an active map-to-frame feature matching method. Feature matching effort is tied to submatrix selection, which has combinatorial time complexity and requires choosing a scoring metric. Via simulation, the Max-logDet matrix revealing metric is shown to perform best. For real-time applicability, the combination of deterministic selection and randomized acceleration is studied. The proposed algorithm is integrated into monocular & stereo feature-based VSLAM systems. Extensive evaluations on multiple benchmarks and compute hardware quantify the latency reduction and the accuracy & robustness preservation.