 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal-Local Airborne Mapping (GLAM): Reconstructing a City from Aerial Videos
Paper and Code
Jun 07, 2018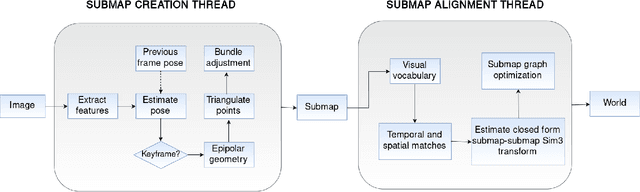
Monocular visual SLAM has become an attractive practical approach for robot localization and 3D environment mapping, since cameras are small, lightweight, inexpensive, and produce high-rate, high-resolution data streams. Although numerous robust tools have been developed, most existing systems are designed to operate in terrestrial environments and at relatively small scale (a few thousand frames) due to constraints on computation and storage. In this paper, we present a feature-based visual SLAM system for aerial video whose simple design permits near real-time operation, and whose scalability permits large-area mapping using tens of thousands of frames, all on a single conventional computer. Our approach consists of two parallel threads: the first incrementally creates small locally consistent submaps and estimates camera poses at video rate; the second aligns these submaps with one another to produce a single globally consistent map via factor graph optimization over both poses and landmarks. Scale drift is minimized through the use of 7-degree-of-freedom similarity transformations during submap alignment. We quantify our system's performance on both simulated and real data sets, and demonstrate city-scale map reconstruction accurate to within 2 meters using nearly 90,000 aerial video frames - to our knowledge, the largest and fastest such reconstruction to date.