 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGIRA: Gaussian Mixture Models for Inference and Robot Autonomy
Paper and Code
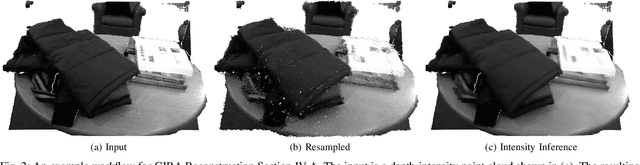
Large-scale deployments of robot teams are challenged by the need to share high-resolution perceptual information over low-bandwidth communication channels. Individual size, weight, and power constrained robots rely on environment models to assess navigability and safely traverse unstructured and complex environments. State of the art perception frameworks construct these models via multiple disparate pipelines that reuse the same underlying sensor data, which leads to increased computation, redundancy, and complexity. To bridge this gap, this paper introduces GIRA -- an open-source framework for compact, high-resolution environment modeling using Gaussian mixture models (GMMs). GIRA provides fundamental robotics capabilities such as high-fidelity reconstruction, pose estimation, and occupancy modeling in a single continuous representation.