Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGhost-DeblurGAN and Its Application to Fiducial Marker System
Paper and Code
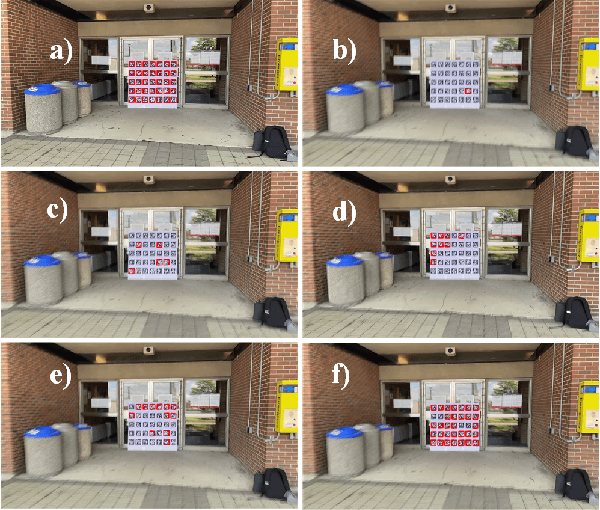
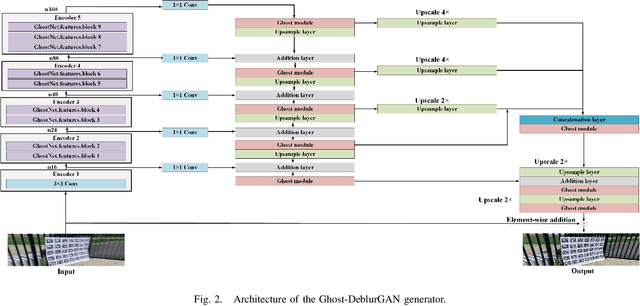
Motion blur can impede marker detection and marker-based pose estimation, which is common in real-world robotic applications involving fiducial markers. To solve this problem, we propose a novel lightweight generative adversarial network (GAN), Ghost-DeblurGAN, for real-time motion deblurring. Furthermore, a new large-scale dataset, YorkTag, provides pairs of sharp/blurred images containing fiducial markers and is proposed to train and qualitatively and quantitatively evaluate our model. Experimental results demonstrate that when applied along with fudicual marker systems to motion-blurred images, Ghost-DeblurGAN improves the marker detection significantly and mitigates the rotational ambiguity problem in marker-based pose estimation.
* 7 pages, 5 figures
View paper on