 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoreferencing of Photovoltaic Modules from Aerial Infrared Videos using Structure-from-Motion
Paper and Code
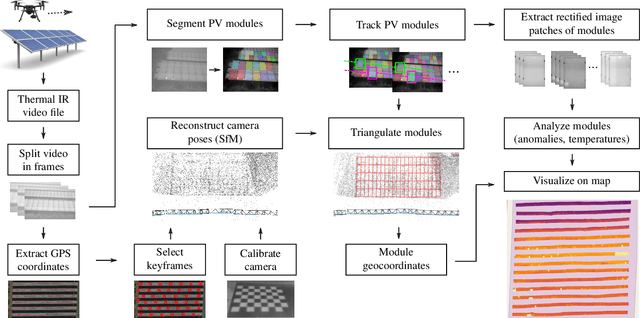

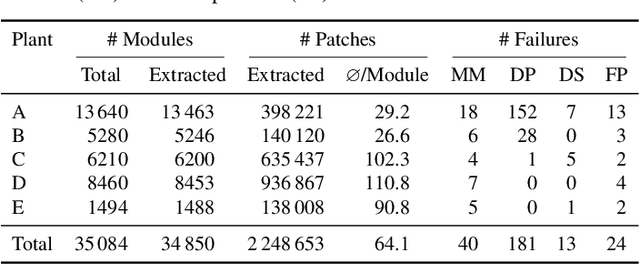
To identify abnormal photovoltaic (PV) modules in large-scale PV plants economically, drone-mounted infrared (IR) cameras and automated video processing algorithms are frequently used. While most related works focus on the detection of abnormal modules, little has been done to automatically localize those modules within the plant. In this work, we use incremental structure-from-motion to automatically obtain geocoordinates of all PV modules in a plant based on visual cues and the measured GPS trajectory of the drone. In addition, we extract multiple IR images of each PV module. Using our method, we successfully map 99.3 % of the 35084 modules in four large-scale and one rooftop plant and extract over 2.2 million module images. As compared to our previous work, extraction misses 18 times less modules (one in 140 modules as compared to one in eight). Furthermore, two or three plant rows can be processed simultaneously, increasing module throughput and reducing flight duration by a factor of 2.1 and 3.7, respectively. Comparison with an accurate orthophoto of one of the large-scale plants yields a root mean square error of the estimated module geocoordinates of 5.87 m and a relative error within each plant row of 0.22 m to 0.82 m. Finally, we use the module geocoordinates and extracted IR images to visualize distributions of module temperatures and anomaly predictions of a deep learning classifier on a map. While the temperature distribution helps to identify disconnected strings, we also find that its detection accuracy for module anomalies reaches, or even exceeds, that of a deep learning classifier for seven out of ten common anomaly types. The software is published at https://github.com/LukasBommes/PV-Hawk.