 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenZ-ICP: Generalizable and Degeneracy-Robust LiDAR Odometry Using an Adaptive Weighting
Paper and Code
Nov 11, 2024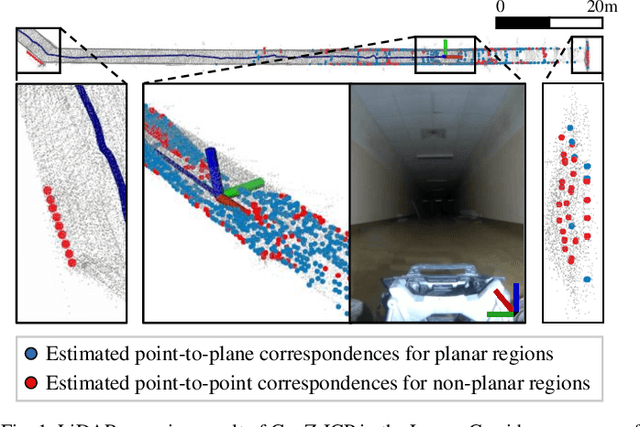
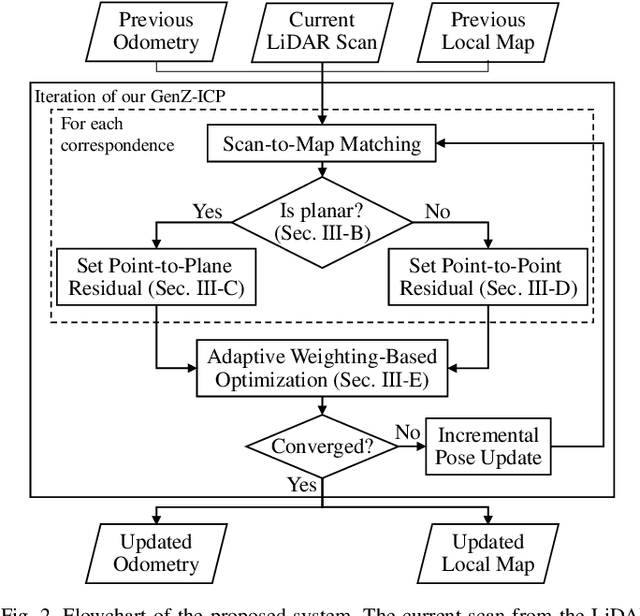
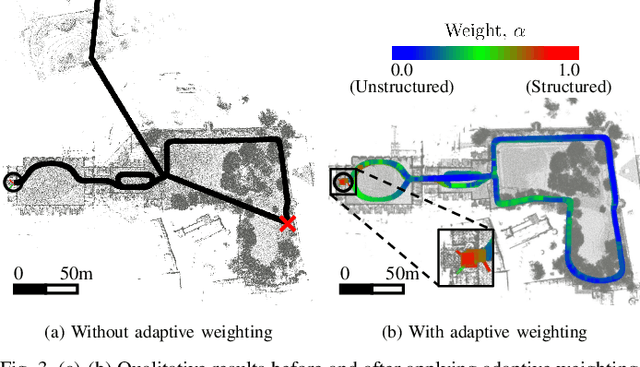
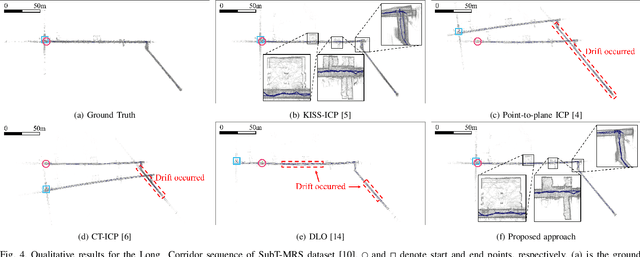
Light detection and ranging (LiDAR)-based odometry has been widely utilized for pose estimation due to its use of high-accuracy range measurements and immunity to ambient light conditions. However, the performance of LiDAR odometry varies depending on the environment and deteriorates in degenerative environments such as long corridors. This issue stems from the dependence on a single error metric, which has different strengths and weaknesses depending on the geometrical characteristics of the surroundings. To address these problems, this study proposes a novel iterative closest point (ICP) method called GenZ-ICP. We revisited both point-to-plane and point-to-point error metrics and propose a method that leverages their strengths in a complementary manner. Moreover, adaptability to diverse environments was enhanced by utilizing an adaptive weight that is adjusted based on the geometrical characteristics of the surroundings. As demonstrated in our experimental evaluation, the proposed GenZ-ICP exhibits high adaptability to various environments and resilience to optimization degradation in corridor-like degenerative scenarios by preventing ill-posed problems during the optimization process.