 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Optimal Plans in Highly-Dynamic Domains
Paper and Code
May 09, 2012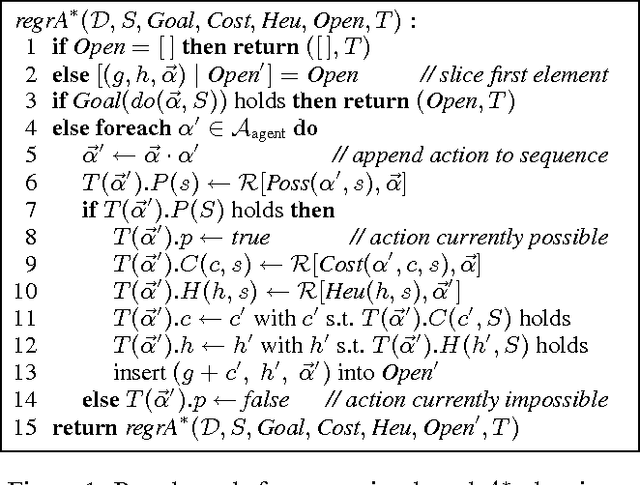
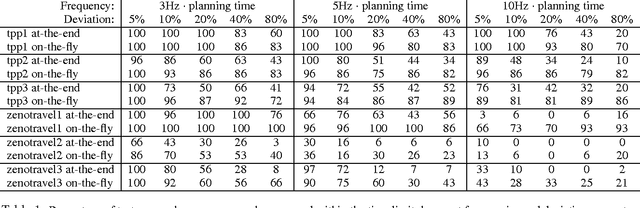
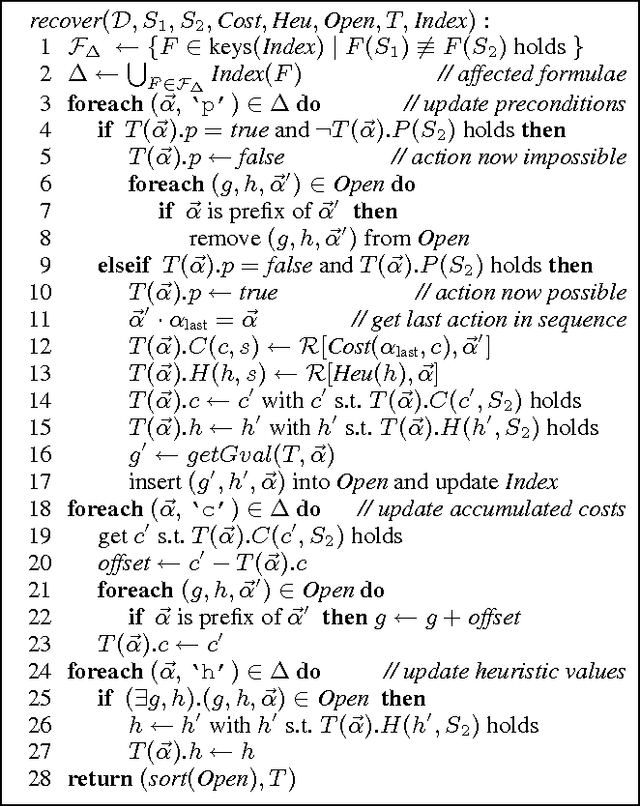
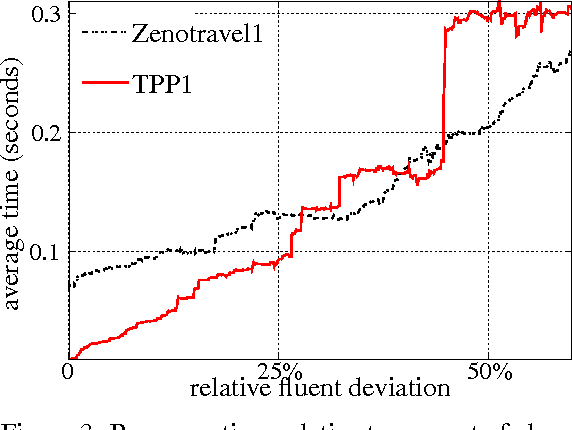
Generating optimal plans in highly dynamic environments is challenging. Plans are predicated on an assumed initial state, but this state can change unexpectedly during plan generation, potentially invalidating the planning effort. In this paper we make three contributions: (1) We propose a novel algorithm for generating optimal plans in settings where frequent, unexpected events interfere with planning. It is able to quickly distinguish relevant from irrelevant state changes, and to update the existing planning search tree if necessary. (2) We argue for a new criterion for evaluating plan adaptation techniques: the relative running time compared to the "size" of changes. This is significant since during recovery more changes may occur that need to be recovered from subsequently, and in order for this process of repeated recovery to terminate, recovery time has to converge. (3) We show empirically that our approach can converge and find optimal plans in environments that would ordinarily defy planning due to their high dynamics.