 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Shared Control versus Classical Shared Control: Illustrative Examples
Paper and Code
May 28, 2017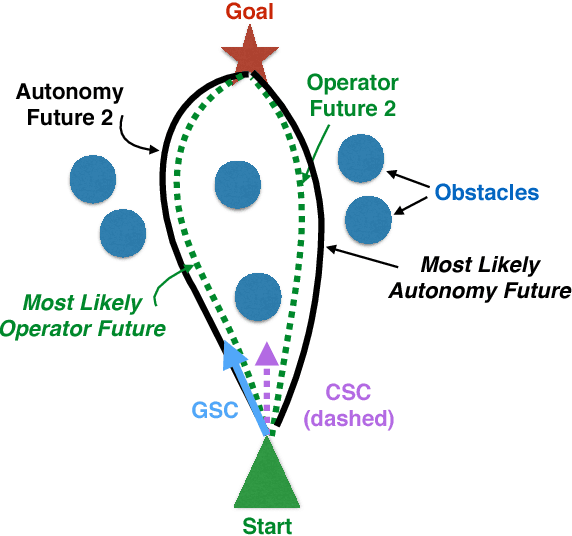
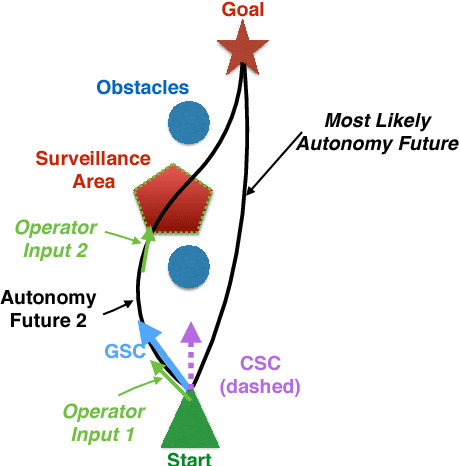

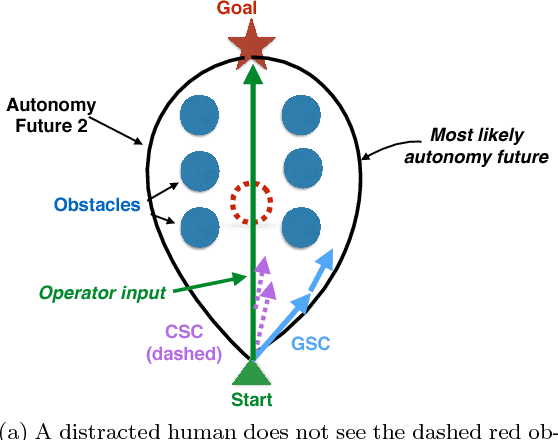
Shared control fuses operator inputs and autonomy inputs into a single command. However, if environmental or operator predictions are multimodal, state of the art approaches are suboptimal with respect to safety, efficiency, and operator-autonomy agreement: even under mildly challenging conditions, existing approaches can fuse two safe inputs into an unsafe shared control [13]. Multi-modal conditions are common to many real world applications, such as search and rescue robots navigating disaster zones, teleoperated robots facing communication degradation, and assistive driving technologies. In [11, 13], we introduced a novel approach called generalized shared control (GSC) that simultaneously optimizes autonomy objectives (e.g., safety and efficiency) and operator-autonomy agreement under multimodal conditions; this optimality prevents such unsafe shared control. In this paper, we describe those results in more user friendly language by using illustrations and text.