 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGame and Simulation Design for Studying Pedestrian-Automated Vehicle Interactions
Paper and Code
Sep 30, 2021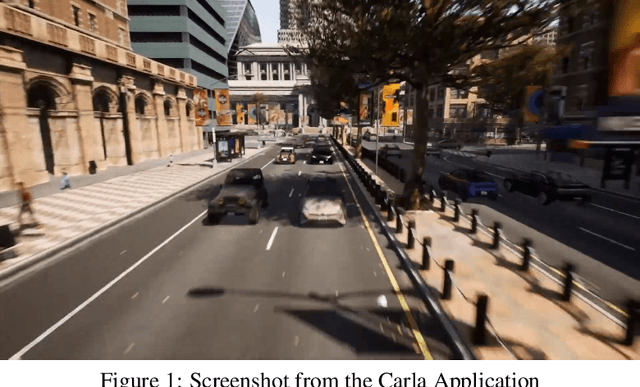
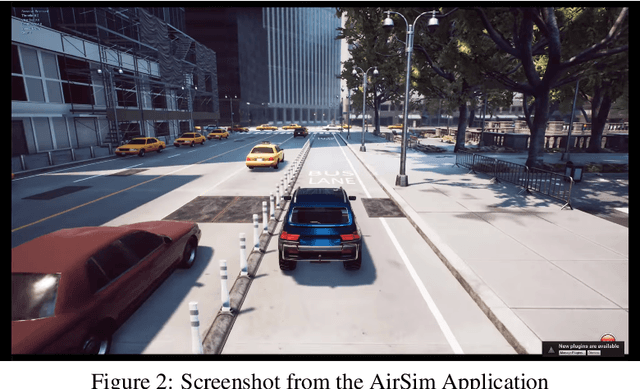

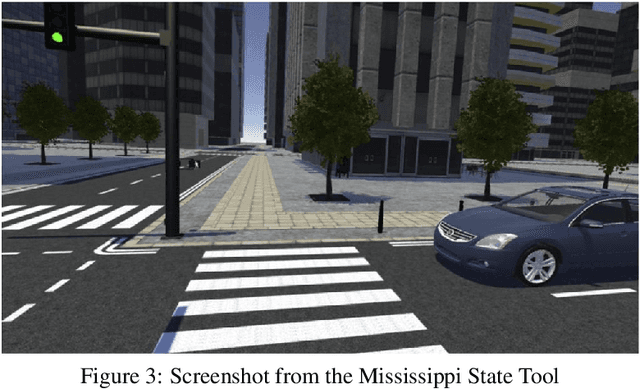
The present cross-disciplinary research explores pedestrian-autonomous vehicle interactions in a safe, virtual environment. We first present contemporary tools in the field and then propose the design and development of a new application that facilitates pedestrian point of view research. We conduct a three-step user experience experiment where participants answer questions before and after using the application in various scenarios. Behavioral results in virtuality, especially when there were consequences, tend to simulate real life sufficiently well to make design choices, and we received valuable insights into human/vehicle interaction. Our tool seemed to start raising participant awareness of autonomous vehicles and their capabilities and limitations, which is an important step in overcoming public distrust of AVs. Further, studying how users respect or take advantage of AVs may help inform future operating mode indicator design as well as algorithm biases that might support socially-optimal AV operation.