Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Convolutional Geometric Features for Category-level Object Alignment
Paper and Code
Mar 08, 2021
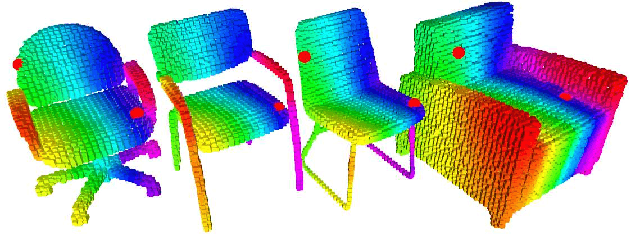
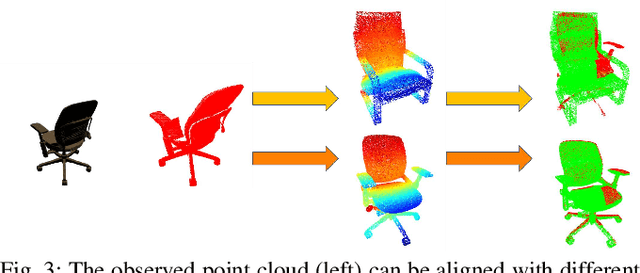

This paper focuses on pose registration of different object instances from the same category. This is required in online object mapping because object instances detected at test time usually differ from the training instances. Our approach transforms instances of the same category to a normalized canonical coordinate frame and uses metric learning to train fully convolutional geometric features. The resulting model is able to generate pairs of matching points between the instances, allowing category-level registration. Evaluation on both synthetic and real-world data shows that our method provides robust features, leading to accurate alignment of instances with different shapes.
* 2020 IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), Las Vegas, NV, USA, 2020, pp. 8492-8498 * 7 pages, 9 figures
View paper on