 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFragile object transportation by a multi-robot system in an unknown environment using a semi-decentralized control approach
Paper and Code
Sep 12, 2022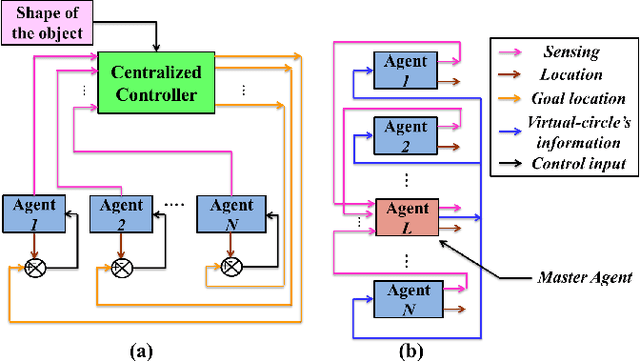
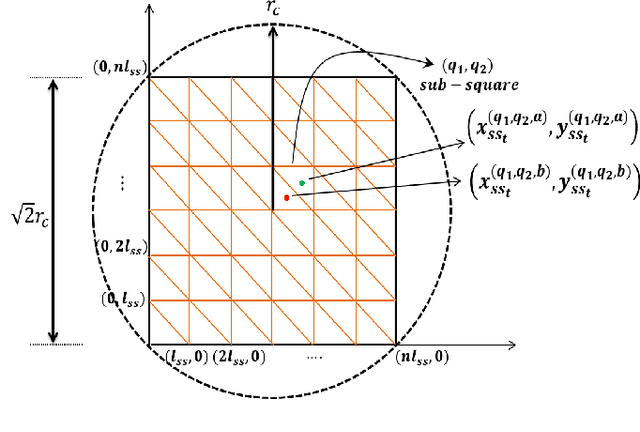
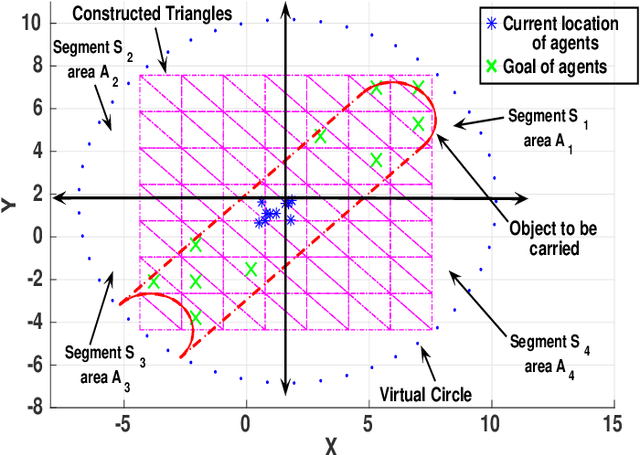
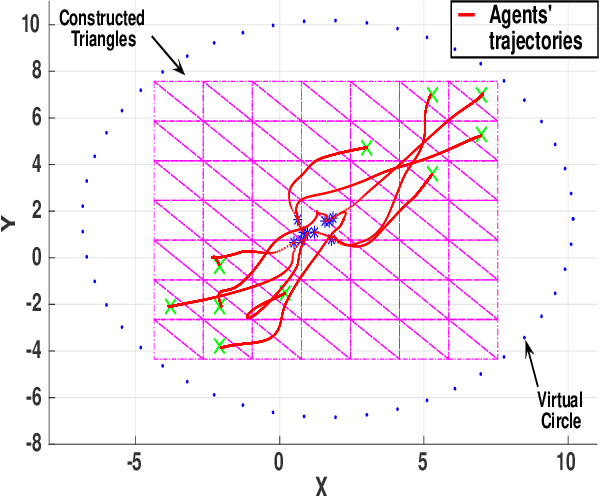
In this paper, we introduce a semi-decentralized control technique for a swarm of robots transporting a fragile object to a destination in an uncertain occluded environment.The proposed approach has been split into two parts. The initial part (Phase 1) includes a centralized control strategy for creating a specific formation among the agents so that the object to be transported, can be positioned properly on the top of the system. We present a novel triangle packing scheme fused with a circular region-based shape control method for creating a rigid configuration among the robots. In the later part (Phase 2), the swarm system is required to convey the object to the destination in a decentralized way employing the region based shape control approach. The simulation result as well as the comparison study demonstrates the effectiveness of our proposed scheme.