 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForward and Inverse Kinematics of a Single Section Inextensible Continuum Arm
Paper and Code
Jul 15, 2019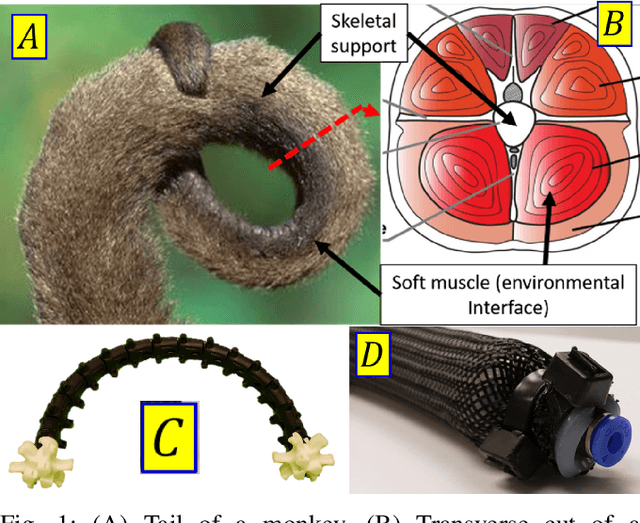
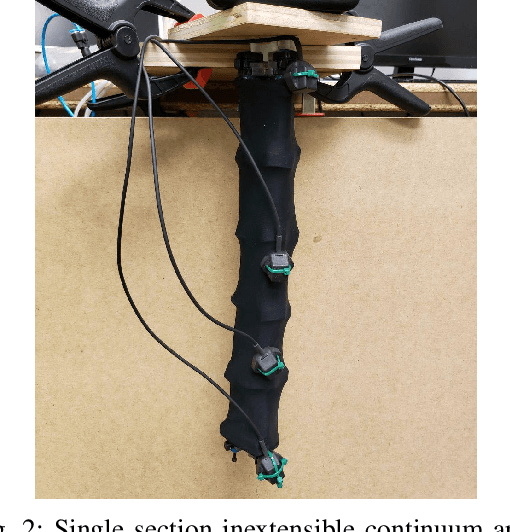
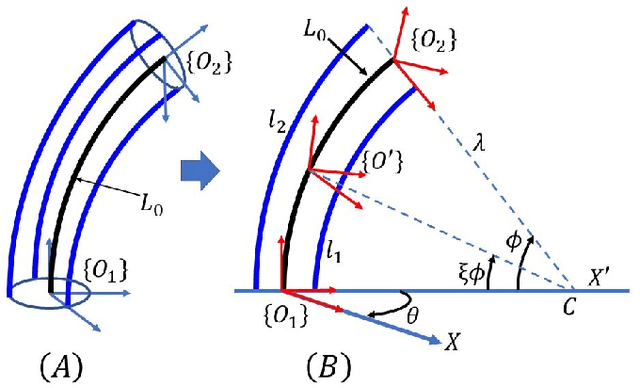
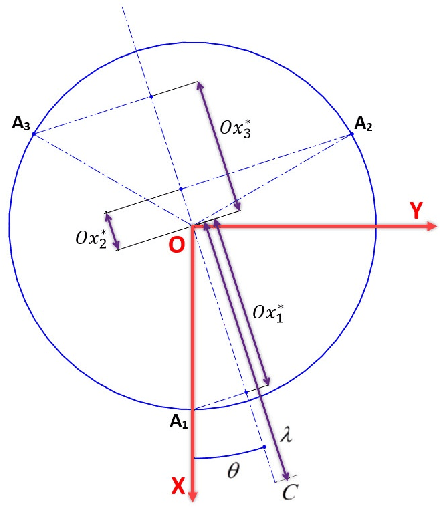
Continuum arms, such as trunk and tentacle robots, lie between the two extremities of rigid and soft robots and promise to capture the best of both worlds in terms of manipulability, dexterity, and compliance. This paper proposes a new kinematic model for a novel constant-length continuum robot that incorporates both soft and rigid elements. In contrast to traditional pneumatically actuated, variable-length continuum arms, the proposed design utilizes a hyper-redundant rigid chain to provide extra structural strength. The proposed model introduces a reduced-order mapping to account for mechanical constraints arising from the rigid-linked chain to derive a closed-form curve parametric model. The model is numerically evaluated and the results show that the derived model is reliable.